3 概観
- 外観
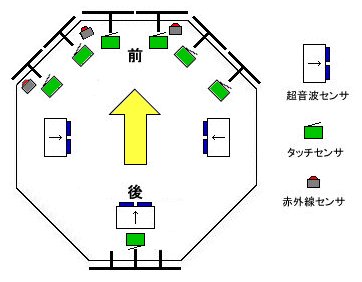
- MIRS0003の外観を右図に示す。
- MIRS0003の外観を右図に示す。
- ボディの外形
- ボディの外形は獲得までの軌道,獲得動作,獲得してから次の軌道それぞれに対応したつくりになっている。→ 正八角形
- 正八角形である理由
- 前部のタッチセンサの配置が進行方向と垂直のものと,進行方向と45°の角度をなす面が必要だから。(ポストの獲得の仕方による)
- 正方形以外の形の中で,1.の条件に当てはまっていて,かつ,面積を有効利用できるものといえば,正八角形しか当てはまらないから。
- 前部だけ1.のような形だとバランス的に不安定になると見込んだため。
- 前部のタッチセンサの配置が進行方向と垂直のものと,進行方向と45°の角度をなす面が必要だから。(ポストの獲得の仕方による)
- ボディの外形は獲得までの軌道,獲得動作,獲得してから次の軌道それぞれに対応したつくりになっている。→ 正八角形
- センサの数
超音波センサ : 4
タッチセンサ : 7
赤外線センサ : 3
より正確な値を出すためには,より多くのセンサを配置しなければならないことより,これらの数になった。
もちろんこれをより測定に有効な配置にすることも大切なことである。
- センサの配置位置とその役目
配置位置 役目 超音波センサ ボディの右と左1つずつ
後部に2つ
それぞれ内向きに配置[内向きにするのは,超音波センサが,20㎝以下は測定不能であるため。
すなわち,ボディの端から20㎝離して外向きに配置しているのである。]
後部のセンサ(前向きのセンサ)2つはポスト発見後のポストとの距離の確認、壁との距離の確認。
右のセンサ(左向きのセンサ)は主に軌道が壁伝い左回りなので左にしかないポストの位置確認。
左のセンサ(右向きのセンサ)は主に壁伝いに走行するときに壁との距離を保持する。タッチセンサ 前部の進行方向と垂直な面に2つ
45°の面に左右2つずつ
後部に1つ前部のセンサはポール獲得動作の中にある「ポールにぶつかってポールの回り方を決める」
という動作に使う赤外線センサ 前部に1つ
左側に2つ前部のセンサはポールを回る前に,前にあるスイッチを感知する
左側の2つはポールを回っているときに周回軌道の内側にあるスイッチを感知する
4 MIRSの軌道
-
全体の概要
①スタート位置から反時計回りに周回
②一周周回した後、真中を直進

-
スタート位置から周回軌道まで
スタート位置では向きが中を向いているので、いったん後ろに下がり右に向きを変える

-
周回軌道について
①軌道は、壁から45cmまでの範囲を反時計回りに周回する。MIRS右側につけた超音波センサで壁との距離を計り、補正をかける。
②横の緑色の部分はポールを感知するために内側に超音波センサを使う。(詳しいことはポールの獲得を参照)

5 ポストの獲得
- ポストへ接近する
- ポストの獲得
- 元の軌道へ戻る

超音波センサがポストを感知した時点でMIRSは前進を止めて、その場回転し90度左を向く(左右車輪をお互いに逆回転させる)。
このときポストはMIRS前方の大まかな軌道上にあればいい。
前面の超音波センサでポストを確認しながら前進してポストへ接近する。
MIRSがポストと接触するとき、前面に取り付けられたタッチセンサによりポストが確認される。
又このときMIRSのどこに取り付けられているタッチセンサが反応したかにより、ポストの大まかな位置が把握される。

ポストを回る軌道についてはいくつかのパターンが決められていて、把握したポストの位置によりその中から一つ決定する。
回り方は左回りに限られていて、前方と左側に取り付けられた赤外線センサによりスイッチの位置を探しながら回る、スイッチを見つけたら90度左を向きポストを獲得する。
ポスト獲得後、元の回る軌道に壁へ接触するまでもどり外周軌道へと復帰します。
競技場の中心を進みながら超音波でのポスト探索は左右で行う。 センサがポストを感知したら、上の1、2、3の行動を繰り返しポストを獲得する。