
1年生から今まで培ってきた知識を フルに活用し、チーム一丸となって迷路の攻略を目指します。各班でも脱出方法は異なります。ユニークなアイディアで どの班も1位を目指して頑張ります。
| MIRS2010 | |
|
|
|
|
沼津高専電子制御工学科では第4学年の電子機械設計製作において小型自律移動ロボットの製作をカリキュラムに
取り入れています。創造性教育としてのものづくり教育のみならず、字ステム開発のプロセス全般の学習を目的と
しており、企業における実際の開発プロセスと同等に授業は進行されます。 1年生から今まで培ってきた知識を フルに活用し、チーム一丸となって迷路の攻略を目指します。各班でも脱出方法は異なります。ユニークなアイディアで どの班も1位を目指して頑張ります。 |
|
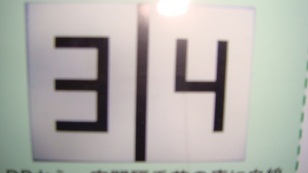
| Direction board | |
|
|
|
|
| ロータリー | |

|
|
|
|
| 小部屋 | |

|
|
|
|
| 十字路 | |

|
|
|
今年から新たに加わった新要素です。
十字路の先にはのれん風のDirection Boardを取り付け、数字認識により,3つの道のうちのどの道に行くのかを 決めてもらえます。この迷路の最大の難所といっても過言ではありません。 |
|
| シーソー | |

|
|
|
|
| 鍵 | |
|
|
|
|
| 扉 | |

|
|
|
|
| ステップ | |

|
|
|
|
| ゴール | |
|
|
|
|
|