MIRS97システム提案書
D3 38 山下 光太郎
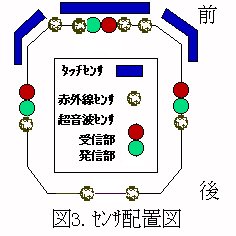
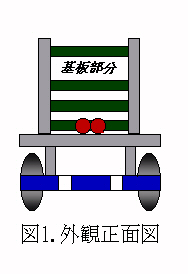
1. MIRSの外観イメージ
まずは、MIRSの外観正面図と、外観側面図を、図1と図2に示す。
本体の正面には、壁や相手のMIRSに当たったときの回避をするためのタッチセンサが
ついています。
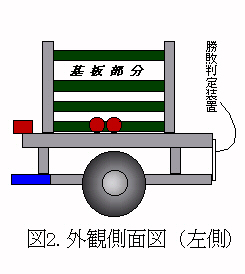
2. MIRSのセンサ配置図
次に本機に付ける各センサの配置を図3に示します。
使用するセンサは、以下の通り。
| 使用するセンサの種類 | 配置する場所 | センサの個数 |
| タッチセンサ | 本体正面、正面左右 | 3個 |
| 赤外線センサ | 本体正面、後方、左右 | 8個 |
| 超音波センサ | 本体左右、正面 | 3対 |
3. 戦略と特徴
自分のいる位置を確認して相手に積極的に攻撃をしかける。
相手の赤外線を感知したら、直ちに攻撃体制に入る。そして、攻撃。
正面に配置されたタッチセンサは基本的に回避行動をとるために使用。
相手機の探索は主に超音波センサを使用する。
特徴として、正面の一番右と左の赤外線センサはそれぞれ
45°ずつ外へ開いているかんじにする。これはより広範囲の赤外線を
感知できるようにするためである。
4. 検討事項
行動の優先順位
1 回避行動 : 相手との衝突や壁への衝突でタッチセンサを反応させる。
2 戦闘行動 : 相手からの赤外線を感知した場合すぐに攻撃モードに入る。
3 探索行動 : 超音波センサで自分や相手の位置確認。
回避行動として・・・・・・
特徴として本体正面にタッチセンサを3つ付けた。これは、壁にぶつかったとき
などのため。左右正面と3つのタッチセンサを使うことにより角に入ったときには正面の
センサが反応しなくても左右のセンサが反応してそのときの対応をしてくれる。
ここで、角に追い込まれて後ろから勝敗判定装置を押されてしまうのを避ける為に
本体を一度後ろにさげてそれから方向転換するといったようにせず右後方や左後方
に回避するという方法も良いと思う。
戦闘行動として・・・・・・
超音波センサに相手らしき物が反応したら、本体を1回転させる。そして、
相手が発している赤外線を感知するかどうかを調べる。もし感知したならば
攻撃に入る。(これはちょっとむずかしかもしれない。というのは追跡状態に
入るまで動作を速くしなければ相手に逃げられしまい、せっかく感知したのに
もったいない・・・・)。
赤字で書いてあることについて:
超音波センサで反応したら本体を1回転させる。これはようするに相手のMIRSが
接近している可能性があるので回転させることにより相手の赤外線を感知
するのである。だから、赤外線センサを正面、後方左右の全方向に配置して
少しの赤外線も逃さないようにする。また、赤外線を感知するまでその場で
回転運動をしていると、時間のロスになりつまらない動きになってしまうため
1回転だけにした。
ここで、感知する赤外線センサの位置によって次の動作が違ってくる。
もし正面の2つのうちどちらが感知した場合・・・そのまま前進し追跡開始。
正面左の赤外線センサが感知した場合・・・本体を左に45°回転させる。
正面右の赤外線センサが感知した場合・・・本体を右に45°回転させる。
後方の2つのうちどちらかが感知した場合・・本体を180°回転させる。
左方の赤外線センサが感知した場合・・・・・本体を90°左に回転させる。
右方の赤外線センサが感知した場合・・・・・本体を90°右に回転させる。
探索行動として・・・・・・
自分のいる位置の確認は180°以内のその場の回転によって超音波センサを
利用して行う。
相手のいる位置の確認は超音波センサと赤外線センサを利用して探索を行う。