システム提案書
このmirsの狙いは「追跡型MIRS」
スタート直後のコースの決定を主にエンコーダーで行い、すばやく相手機の後ろに回り、相手機のスイッチを押すことを目標とします。
バンバーを巡らせて、衝突から自機を守るようにします。
1. センサの配置
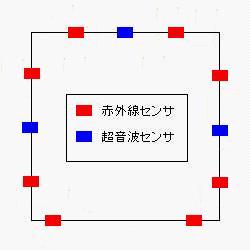
使用するセンサは、超音波センサが3対、赤外線センサが8つです。
本体への配置はfig.1のように行います。
fig. 1 各センサの配置
 |
2. 動作
2.1. 基本動作
まず、競技場には、右壁面を向かせて本体を置きます。
スタートと同時に、エンコーダーを使って曲線をえがいて相手のスタート地点の横まで進み、小さく回って相手のスタートした地点まで進み、方向転換。相手を探しながら直進します。
そこからは超音波センサを使い、侵入禁止ゾーンにそって左回りに進みます。
2.2. 相手機の探索
相手の探索は、超音波センサを使って行います。
超音波センサに相手機らしきものが反応したら、左に90度回転し、相手機の追跡を行います。
2.3. 追跡と勝敗の決定
相手機の追跡には、赤外線センサを用います。
正面に設置した2つのセンサのどちらかで受光できるように設定します。
相手機の勝敗判定装置を押して、競技を終了します。