MIRS97 システム提案書
提案者 D3 33 平松 拓也
以下に私が提案するMIRSの概要を示します。
1. 外観
1.1 外観
本体は真上から見ると正方形で、前面と側面にバンパーを付けて
壁などから自機を守り、また接近戦時に相手MIRSの動きなどを把握する。
1.2 センサー類
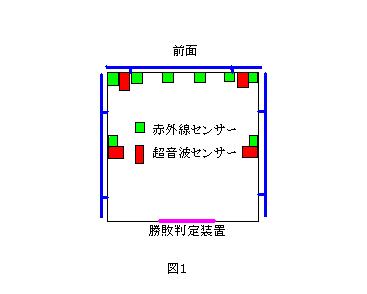
使用するセンサーは ・赤外線センサー 8個
・超音波センサー 4組
・タッチセンサー 3個
であり、以下にそのセンサーの配置図を図1に示します。
2. 動作
図2をもとに以下の説明をします。
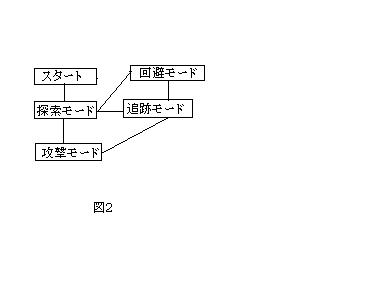
2.1 初期動作 (スタートモード)
自機MIRSをスタート位置に前向きに置き、スタートと同時に前方タッチセンサーが押されるまで直進する。
この時、自機MIRSは、相手MIRSか壁にあたります。
2.2 相手MIRSの探索 (探索モード)
相手機探索は超音波と赤外線センサーを使用します。
・タッチセンサーについて(回避モード)
タッチセンサーは前面及び、側面につけます。
ここで、各タッチセンサーの状態とその後の動作を説明します。
A. 前面 ON->・壁に衝突。
・相手MIRSに衝突。
-動作-
1.もう1度前進して衝突する。
2.超音波センサーにより位置の確認をする。
3.壁と判断した場合、R(=30~50cm)をつけて後退し、引き続き探索モードを続ける。
4.相手MIRSと判断した場合、追跡モード又は、攻撃モードに入る。
5.超音波センサーにより位置の確認をする。
B.側面 ON->・壁に衝突
・相手MIRSが自機MIRSに衝突。
-動作-
1.超音波センサーにより位置の確認をする。
2.壁と判断した場合、その場回転により後面を壁に向け、再び探索モードを続ける。
3.相手MIRSと判断した場合、タッチセンサーがONされた方向にその場回転して追跡モード又は、攻撃モードに入る。
4.超音波センサーにより位置の確認をする。
2.3 追跡と勝敗の決定(追跡モード)
相手MIRSの追跡には探索モードと同じ超音波と赤外線センサーを使用します。
追跡モードでは主に超音波センサーで相手MIRSとの距離をつめていきます。
2.4 攻撃モード
攻撃モードでは主に前面に取り付けた赤外線センサーを使用します。
さらに超音波センサーにより相手MIRSとの距離を測ります。
(* どのモードにおいてもロータリエンコーダを使用する。)
平松 拓也 hiramatu@eces.numazu-ct.ac.jp
H9/11/13(Thr) 作成