1.戦略と特徴
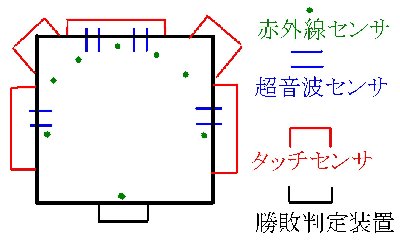
a.進入禁止ゾーンに入らないようにして外周を旋回する。 b.止まっている時間を極力少なくする。(敵機が前方にいるときは、様子を見て止まる。) c.自機の位置を認識しながら、敵機のおおよその方向を把握する。 d.赤外線センサーが反応したら敵機を追う。
| モード について | |
|---|---|
| 旋回探索モード これを基本モードとする |
外周を旋回する。(進入禁止ゾーンに入らないようにして) 一定距離進んだらその場で回転しながら、超音波センサーで位置認識。 その時壁までの距離に誤差が出たらその方向に敵機がいると認識して、 接近モードへ |
| 近距離探索モード |
その場回転して、前方の超音波センサーで敵機を探す。 反応があってその物体が動いていれば(壁でなければ)、敵機と認識し、 接近モードへ |
| 接近モード |
前方の超音波センサー2個で敵機がする前後左右の動きを捕らえ、 曲がりながら近づく。(ロータリーエンコーダ使用) 一定距離近づいたら様子を見て、敵機が同じようなプログラムで動いていたときの対策として 一定時間たったら少し動いてまた止まる。(敵機を動かせるから) |
| 中距離攻撃モード |
赤外線センサーが反応したら、中距離攻撃モードへ(このモード) 前方の赤外線センサーにより敵機の左右の動きについていく。(ロータリーエンコーダ使用) 赤外線センサーが反応しなくなったら、旋回探索モードへ 前面のタッチセンサーに反応があったら、そのまま。 前面右(左)のタッチセンサーに反応があったら、近距離攻撃モードへ |
| 近距離攻撃モード |
中距離攻撃モードのときの反応に合わせ右(左)に曲がりながら前進する。(ロータリーエンコーダ使用) 赤外線センサーが反応しなくなったら、近距離探索モードへ |
| 回避モード |
攻撃モード以外でタッチセンサーに反応があったら、逃げる。 一定距離走ったら,旋回探索モードへ |
| 行動の優先順位 | |
|
1st. タッチセンサー反応時の回避または攻撃 2nd. 赤外線センサー反応時の攻撃 3rd. 超音波センサーによる自己および相手位置の把握 4th. 超音波センサーによる相手への接近 |
|