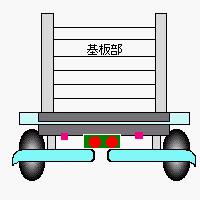
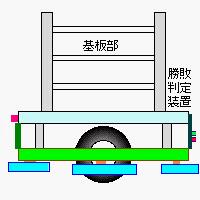
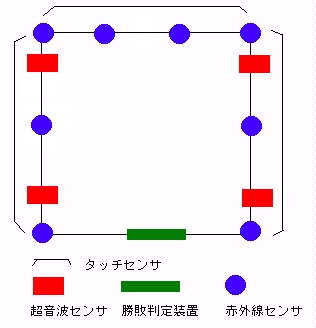
丒僙儞僒乕偺攝抲
丒僙儞僒乕偺攝抲
侾丄愴棯偲摿挜乮摦嶌乯
丒忢偵憡庤偵懳偟偰懁柺傪岦偗偰嫍棧傪應傞丅乮侾乕侾乯
丒憡庤傪昁偢帺暘偲暻偺娫偵偲傜偊傞丅乮侾乕俀乯
丒憡庤傪愒奜慄僙儞僒偱偲傜偊偨傜捈偪偵偮傔偵擖傝丄憡庤傪尒幐傢側偄傛偆偵捛偄偐偗傞丅乮侾乕俁乯
丒俵俬俼俽偺夞揮偼丄憡庤傪愒奜慄僙儞僒偱偲傜偊偮傔偵擖傞偲偒埲奜偼亇俋侽亱丄傕偟偔偼丄侾俉侽亱偲偡傞丅乮侾乕係乯
丒憡庤偲偺徴撍偵傛偭偰丄傑偨偼乮侾乕俁乯傪峴偄丄暻偲悅捈偱側偔側偭偨傜嵍塃偺挻壒攇僙儞僒偱帺暘傪暻偲悅捈偵側傞傑偱夞揮偡傞丅乮侾乕俆乯
俀丄専摙帠崁
丒惓妋偵憡庤傪偲傜偊傞偨傔偵偼
丂傑偢丄挻壒攇僙儞僒偺栤戣揰傪峫偊偰傒傑偟偨丅
丂侾丄懳徾暔偑帺暘偲悅捈傕偟偔偼偦傟偵嬤偄妏搙偱側偔偰偼側傜側偄丅偮傑傝帺暘傗憡庤偑幬傔傪岦偄偨偲偒怣梡偱偒側偔側傞丅
丂俀丄懳徾暔傊偺嫍棧偑暘偐傞偩偗偱偦偺懳徾暔偑壗偐偑暘偐傜側偄丅乮懳徾暔偑暻偐俵俬俼俽偐丅乯
丂偙偙偱摿偵侾偑栤戣揰偲偟偰偁偘傜傟傑偡丅偙傟傪崕暈偟憡庤傪偲傜偊傞偨傔偵憡庤傪帺暘偲暻偺娫偮傑傝懁柺偵偲傜偊傞傛偆偵偟傑偡丅偙偆偡傞偙偲偱忢偵暻傑偱偺嫍棧偼應傞偙偲偑弌棃傑偡丅偟偐偟憡庤俵俬俼俽偼幬傔傪岦偄偰偄傞偐傕偟傟傑偣傫丅偦偙偱帺暘偑暻偲暯峴偵摦偗偽挻壒攇僙儞僒偺帵偡抣偼傎偲傫偳曄壔偟側偄偼偢偱偡丅偦偙偵憡庤偺俵俬俼俽偑偔傟偽丄偦偺抣偑戝偒偔曄壔偟傑偡丅偮傑傝暻偲堦掕偺嫍棧傪曐偭偰偄偨挻壒攇僙儞僒偺抣偑撍慠曄壔偡傟偽揋俵俬俼俽傪敪尒偟偨偲偄偆偙偲偵側傝傑偡丅偙偆偟偰俀偺栤戣揰傕崕暈偱偒傑偡丅
偙傟傪幚峴偡傞偨傔偵乮侾乕係乯丄乮侾乕俆乯偺暻偲暯峴傪曐偮偨傔偺摦嶌偑廳梫偲側傝傑偡丅偙傟偼丄嵍塃偺挻壒攇僙儞僒偺嫍棧偺榓偑丄晳戜偺曈偺挿偝偲摨偠偐偳偆偐挷傋傞偙偲偵傛偭偰峴偄傑偡丅
丒憡庤傪偄偐偵偟偰捛偆偐
丂憡庤傪捛偆偨傔偵偼憡庤偺恑峴曽岦傪偟傞昁梫偑偁傝傑偡丅偦傟傪抦傞偨傔偵擇偮偵暲傋偨挻壒攇僙儞僒偱偳偪傜偺曽岦偵憡庤偑摦偄偨偐妋擣偟丄偦偺曽岦偵捛偭偰偄偒傑偡丅憡庤偺摦偔曽岦偼丄偄偭偨傫摨偠柺偺挻壒攇僙儞僒俀偮偱偲傜偊丄慜屻偺挻壒攇僙儞僒偱愭偵憡庤傪尒幐偭偨曽岦偲媡曽岦偵憡庤偼恑傫偱偄傞偙偲偵側傝傑偡丅
憡庤偑帺暘偺恑峴曽岦偲媡偵摦偄偰偄偨傜捈偪偵俋侽亱曽岦揮姺傪偟丄嵞傃憡庤傪丄偲傜偊傞傑偱慜恑偟傑偡丅憡庤偑帺暘偲摨偠曽岦偵摦偄偰偄偨傜丄憡庤傪敳偔傑偱慜恑偟丄偦偺屻丄俋侽亱曽岦揮姺傪偟傑偡丅偦偆偟偰丄憡庤偺廃傝傪夞傞傛偆偵愙嬤偟丄愒奜慄僙儞僒偱偲傜偊偨傜丄堦婥偵峌寕偟傑偡丅