システム提案書
1.センサー配置図
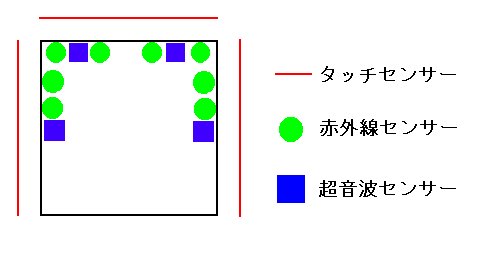 ・上図の通り
2.戦略と特徴
・相手を常に前方に捕らえ続け、後ろをなるべく見せない。
・相手に接近するときは、できる限り相手の動きを先読みし、先行追尾する。
・壁と適を区別するために自己位置の把握をする。
3.検討事項
用意すべきモードとその際使用するセンサー
索敵モード:超音波センサー
追尾モード:超音波センサー
攻撃モード:赤外線センサー
回避モード:超音波センサー、タッチセンサー
・割り込みの優先順位
1.超音波センサー、タッチセンサー反応時の回避(壁と敵から)
2.赤外線センサー反応時の攻撃
3.超音波センサーによる追尾
4.超音波センサーによる索敵
・各モードの説明
索敵モード
・超音波センサーによって、自己位置を把握し、壁と敵が区別できるようにする。
また、進入禁止ゾーンに入ってないかを確認する。その後、左右180度以内の回
転を行い、適の位置の探し出す。
・このモードを基本モードとする。
追尾モード
・適と思われる反応があったら、その方向へすばやく前を向かせ適方向へ移動する
が、その際に前方2つの超音波センサーを使って、できる限り相手を捕らえ続け
る。そしてその2つの超音波センサーで敵の現在の運動方向と速さを把握し、そ
れに対し先読みした動きをして効率よく接近する。
・接近したら相手とやく10cmから20cmの距離を保つ
・運動方向と速さは、ある時間での相手の位置と、それからわずかな時間経過して
からの相手の位置を把握することによって知る。
・追尾中に敵を見失ったら、索敵モードに移行する。
攻撃モード
・敵の赤外線を捕らえることができたら、その方向に直進する。
・攻撃が失敗(敵を見失う)したら、索敵モードに移行する。
回避モード
・タッチセンサーが反応したら即座にこのモードに移行するが、攻撃モード中
( 赤外線を捕らえている間)の前方のタッチセンサーの反応は回避モードに
移行しない。
・具体的な回避行動は様々な場合に対応させるため、何通りかの回避行動パターン
を用意する。
・回避行動を終了したら、索敵モードに移行する。
・上図の通り
2.戦略と特徴
・相手を常に前方に捕らえ続け、後ろをなるべく見せない。
・相手に接近するときは、できる限り相手の動きを先読みし、先行追尾する。
・壁と適を区別するために自己位置の把握をする。
3.検討事項
用意すべきモードとその際使用するセンサー
索敵モード:超音波センサー
追尾モード:超音波センサー
攻撃モード:赤外線センサー
回避モード:超音波センサー、タッチセンサー
・割り込みの優先順位
1.超音波センサー、タッチセンサー反応時の回避(壁と敵から)
2.赤外線センサー反応時の攻撃
3.超音波センサーによる追尾
4.超音波センサーによる索敵
・各モードの説明
索敵モード
・超音波センサーによって、自己位置を把握し、壁と敵が区別できるようにする。
また、進入禁止ゾーンに入ってないかを確認する。その後、左右180度以内の回
転を行い、適の位置の探し出す。
・このモードを基本モードとする。
追尾モード
・適と思われる反応があったら、その方向へすばやく前を向かせ適方向へ移動する
が、その際に前方2つの超音波センサーを使って、できる限り相手を捕らえ続け
る。そしてその2つの超音波センサーで敵の現在の運動方向と速さを把握し、そ
れに対し先読みした動きをして効率よく接近する。
・接近したら相手とやく10cmから20cmの距離を保つ
・運動方向と速さは、ある時間での相手の位置と、それからわずかな時間経過して
からの相手の位置を把握することによって知る。
・追尾中に敵を見失ったら、索敵モードに移行する。
攻撃モード
・敵の赤外線を捕らえることができたら、その方向に直進する。
・攻撃が失敗(敵を見失う)したら、索敵モードに移行する。
回避モード
・タッチセンサーが反応したら即座にこのモードに移行するが、攻撃モード中
( 赤外線を捕らえている間)の前方のタッチセンサーの反応は回避モードに
移行しない。
・具体的な回避行動は様々な場合に対応させるため、何通りかの回避行動パターン
を用意する。
・回避行動を終了したら、索敵モードに移行する。