- 戦略の概要
まず、右へ直進し、進入禁止ゾーンに入らない程度に壁に近づいて競技場内を反時計周りに回る(fig.1)。この時超音波センサを用いた、敵MIRS探索モードになる。敵を見つけた場合、その方向へ直進し攻撃する(fig.2)。この攻撃モードのときは、赤外線センサがもっとも優先される。その後、ある一定条件が満たされたならば、再び敵MIRS探索モード(二回目以降の敵探索モードは、時計周りでも反時計周りでも可能)に入り、その後は以上の行動を繰り返して、敵MIRSに勝利する。(fig.1)
 (fig.2)
(fig.2)
※ 上の(fig.1)(fig.2)において太い線がそのモードにおける行動である。 - 特徴の説明
以下のような特徴がある
- 壁に衝突しないようにして敵MIRSを探索するため、無駄な衝突(敵MIRSや壁との)を防ぎ、より長い期間のMIRSの安定した動作をさらに確実なもにする。
- 理論的に、MIRSが競技場1辺に沿って走行間に必ず敵MIRSを発見するので、より早い攻撃を可能にする。
- それぞれのセンサの得意分野だけを使用しているので、センサの誤動作が少ない(と思われる)。
- 壁に衝突しないようにして敵MIRSを探索するため、無駄な衝突(敵MIRSや壁との)を防ぎ、より長い期間のMIRSの安定した動作をさらに確実なもにする。
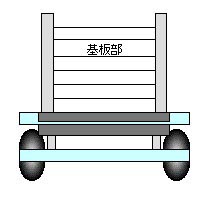
★ (fig.3)赤外線センサ・超音波センサ
赤外線センサの配置法は、敵を捕らえやすくするために、機体の前方にやや弧を描くようにして8個すべてを設置。
超音波センサは、機体と平行な競技場の壁との距離を測るために設置するので、前と左右にそれぞれ1個づつの合計3個設置する。
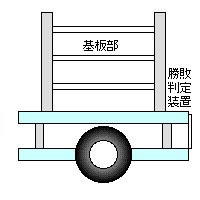
★ (fig.4)タッチセンサ
タッチセンサは、図のように4個所に設置し、各場合の反応は、
| 左 | 右斜め前に進む |
| 右 | 左斜め前に進む |
| 左前 | 急激に右斜め前に進む |
| 右前 | 急激に左斜め前に進む |
- 各モードにおける技術的な実現法
- スタート直後(敵MIRS探索モードに入る前)
使用センサ:ロータリーエンコーダ、タッチセンサ敵MIRSを向いて自機をセットしたときの方向前として、自機を右向きに設置して、スターと後ロータリーエンコーダを用いて、距離を測りながら進入禁止ゾーンの寸前まで進み、そこで反時計周りに90度回転する。
※この時、MIRSのタイヤが走行中にスリップしない限りロータリーエンコーダの値が狂うことは考えられない。
- 敵MIRS探索モード
使用センサ:超音波センサ、タッチセンサ
- 探索中(敵が見つからない)場合
すべての超音波センサが値を出していることが前提で、機体の前方に設置した超音波センサの値が進入禁止ゾーンに入る直前の値を出したら、そこで前進を止め反時計周りに90度回転する。そして、敵を見つけるまでその動作を繰り返す。
- 探索完了(敵を発見した)の場合
- 1個の超音波センサが値を出していないとき
値を出していないセンサの方向に機体を向ける。
- 2個以上の超音波センサが値を出していないとき
右方と前方 前方へ向いて、攻撃モードへ移行 左方と前方 同じ位置しか見ていない機体前方のセンサよりも、左方のセンサの反応を優先し、左方を向いて攻撃モードへ移行。 右方と左方 左方を向いて攻撃モードへ移行。 ※ いずれの場合でも右方のセンサの反応を無視しているのは、自機の位置から考えて、右方に敵MIRSがいることは考えられない為。
- 1個の超音波センサが値を出していないとき
- 探索中(敵が見つからない)場合
- 攻撃モード
使用センサ:赤外線センサ、超音波センサ、タッチセンサ
赤外線センサで敵MIRSを探索しながら前方へ直進し、赤外線の反応があった場合、追跡する。超音波センサは、再度、敵MIRS探索モードに移行する時のために作動させておく。
- スタート直後(敵MIRS探索モードに入る前)
- 補足
☆ある一定条件についてこのある一定条件とは、再度敵MIRS探索モードに移行するときに必要で、その条件は以下の通り。
- すべての赤外線センサに反応がない。
- すべての超音波センサが値を出している。
(fig.5)(fig.6)