僔僗僥儉採埬彂
採埬偡傞偺偼丄乽僗僺乕僪廳帇捛愓宆俵俬俼俽乿偱偡丅
埲壓偵偦偺奣梫傪帵偟傑偡丅
侾丏奜娤&僙儞僒偺攝抲
丂杮懱偼丄恀忋偐傜尒傞偲慜曽偼娵傒傪懷傃偰偄傑偡丅慜柺偵僶儞僷乕傪晅偗丄憡庤婡偲偺徴撍偐傜帺婡傪庣傞傛偆偵偟傑偡丅
奜娤偺僀儊乕僕偼倖i倗丏侾偲倖i倗丏俀偵帵偟傑偡丅
|
|
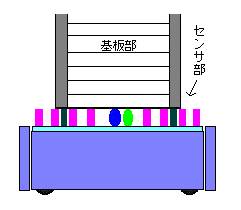
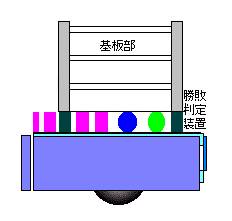
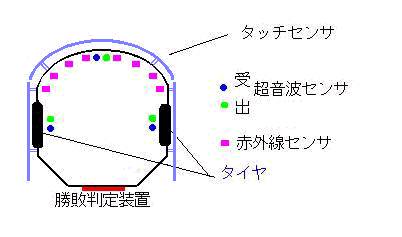
巊梡偡傞僙儞僒偼丄挻壒攇僙儞僒俁懳偲愒奜慄僙儞僒偑俉偮丄
傑偨僞僢僠僙儞僒傪俁偮巊梡偟傑偡丅
杮懱傊偺攝抲偼倖倝倗丏俁偵帵偟傑偡丅
 |
俀丏丂摦嶌
俀丏侾丂婎杮摦嶌
傑偢丄嫞媄応偵偼丄帺暘偺攚柺傪暻偵岦偐偣偰抲偒傑偡丅
僗僞乕僩帪偵偼丄憡庤偼帺暘偺惓柺偵偄傞偺偱慜曽偵偁傞堦掕嫍棧偩偗恑傒傑偡丅
偦偟偰丄憡庤偑僗僞乕僩偟偨応強偺廃曈偐傜愒奜慄僙儞僒偱扵嶕傪奐巒偟傑偡丅
偦傟偐傜偼丄岠棪偑椙偄傛偆偵嫞媄応撪傪慁夞偟偰堏摦偟傑偡丅
俀丏俀丂憡庤婡偺扵嶕
丂偙傟傜偺扵嶕偵偼丄愒奜慄僙儞僒傪梡偄傑偡丅愒奜慄僙儞僒傪梡偄傞帠偱丄憡庤偑栚偺慜偵偄傞偺傪尒摝偝側偄傛偆偵偟傑偡丅
挻壒攇僙儞僒傛傝壗偐傪扵抦偟偨応崌丄偁傞帪娫乮侽丏俆乣侾昩傎偳乯偍偄偰丄嵞傃偦偙傊挻壒攇傪憲傝扵嶕偟傑偡丅
偟偐偟丄偙偺偲偒偵偙傟偑暻偱憡庤偑帺暘偺屻曽偵偄傞応崌傪峫椂偟偰懸偪帪娫偺娫偵屻曽傊偺扵嶕傪峴側偄傑偡丅
偦偟偰嵞傃壗偐傪扵抦偟偨応崌丄偦傟偼暻側偺偱曽岦傪曄偊丄婎杮摦嶌偵栠傝傑偡丅
俀丏俁丂憡庤婡傊偺峌寕
丂憡庤婡偺捛愓偵偼丄愒奜慄僙儞僒傪梡偄傑偡丅愒奜慄僙儞僒偼憡庤屻曽偺捛愓偵梡偄傑偡丅
丂傑偢丄愒奜慄僙儞僒偱憡庤偺屻曽偐偳偆偐傪挷傋傑偡丅
偦偟偰憡庤婡偺屻曽偱偁傞偲擣幆偟偨傜丄捛愓偟丄憡庤婡偺屻曽傪傔偑偗偰慜恑偟丄
僞僢僠僙儞僒偵壗偐偑怗傟偨傜堦帪掆巭傪偟丄嵞傃捛愓偟傑偡丅
憡庤婡偺彑攕敾掕憰抲傪墴偟偰丄嫞媄傪廔椆偟傑偡丅
D3 侾侾斣 憪撱 柧姲