MIRS 97 システム提案書
D3 No.10 梶野尚之 作成日 H9 11月 12日
1.外観
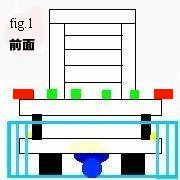
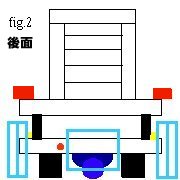
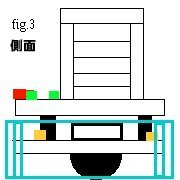
(特徴)
ロータリーエンコーダはモーターに取り付けずに、マシンの土台に取り付けてあるボールに取り付けて、走った距離をしっかりと間違いなくはかれるようにする。これにより、正確な距離測定ができる。
バッテリーは、ラックの上部につけることで、取り外しが楽にできるようにしている。
ラックを載せる2番目の板を、マシンの中心より少し後ろにつけることで、速い速度で走っているときに急に停止してもしても、あまりマシーンが揺れないようにして、安定感をつけている。
2.センサ配置図とその説明
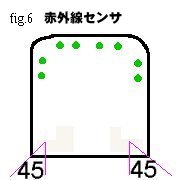
① 赤外線センサの説明
赤外線センサは、相手のLEDからの赤外線を感知する範囲が狭いので、2段目の台の前方に8つすべての赤外線センサを取り付けることで、マシンの前方での赤外線を感知する能力を最大限にした。其れに加えて、2段目の台の前方の2つのかどを丸くすることで、センサが赤外線を感知できる範囲を広くした。この2つの工夫により1度でも敵のLEDからの赤外線を見つければ敵から発せられる赤外線をずっと追い続けることができると思われる。
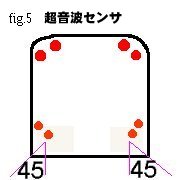
② 超音波センサの説明
超音波センサの役割は、
競技場内での座標からの自分のマシン位置の特定
相手のマシンの場所の特定(相手マシンの探索)
競技場内で決めた座標の原点への移動(マシンの場所の補正)
である。僕のマシンは、超音波センサが、FIG.5のように4隅に45度の角度でついているから、以上3つの項目を調べるときには、マシンを回転させて競技場全体を調べるようにする。
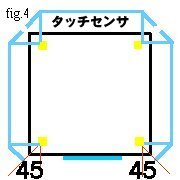
③ タッチセンサの説明
タッチセンサは、バンパーが障害物に当たって動いたことにより反応するように、FIG.4のように取り付ける。 特にマシンの4隅は、障害物に当たったときのバンパーの動きが伝わりやすいように、FIG.4のようにバンパーの角を45度の角度で曲げておくことにより、タッチセンサのマシンの4隅での反応の精度を上げている。
3.動作説明
① 探索モード
まず、マシンは競技場に正面を向いた状態で置く。そしてスタートと同時に、進入禁止ゾーンのラインの手前まで一気に下がる。その位置を、競技場内を座標としておいたときの原点とする。ここから後の処理で、もし赤外線センサが反応した場合には、攻撃モードへ。その場所で下の1:~4:の処理を行う。
1 : その状態で、まず超音波センサを使って相手のマシンを探す。
2 : 次にマシンを左に45度回転させて、その状態で、超音波センサを使って相手のマシンを探す。
3 : その後右に90度回転させて、その状態で超音波センサを使って相手のマシンを探す。
4 : そして最後にもう1度左に45度回転させて、またマシンを正面に向ける。
見つからない場合は、1:~4:を繰り返し、もし相手マシンが、競技場の中央ラインより自分のマシン側のエリアで見つかったときは、相手マシンとの距離の半分の距離まで移動する。その場所でまた、1:~4:を繰り返す。この処理中に相手との距離が30cm以内になったら、②回り込み処理へ。この処理中に障害物に当たって、タッチセンサが反応したときは、③回避処理で障害物を回避して、またその場で1:~4:を繰り返す。探索モード中や回避処理後に相手マシンを見失ったときは(1:~4:が10回繰り返された時は)、自分の位置を確認した上で、もう1度競技場内の原点に戻って、①捜索モードを初めから行う。
② 回り込み処理
①捜索モードで相手マシンとの距離は、30cmにまで近づいているから、相手マシンの回りを1周することで、相手のLEDから発する赤外線を調べることができる。なので、R=40cmとして相手の周りを旋回する。その1周旋回している間に、赤外線センサが反応したら、④攻撃モードへ。1周して反応がなかった場合は、相手が近くにいるかもしれないので、自分の位置を確認した上で、すばやくもう1度競技場内の原点に戻って、①探索モードを初めから行う。
③ 回避処理
回避処理は、タッチセンサを用いて障害物の回避を行う。タッチセンサは4角につけられているから、この4つのセンサを使って、①前 ②右 ③左 ④右上 ⑤右下 ⑥左上 ⑦左下 の計7方向の障害物のあるなしを調べることができる。
1.障害物が壁のとき
この時は敵が後ろにいるかもしれないので、障害物のあった方向の逆の方向に10cm移動してから、敵に背を見せないようにどのセンサが反応したかにより、決められた角度回転して(表 1を参照)競技場の中心を向いて、進入禁止ゾーンから出て、壁に当たる前に行っていた処理に戻る。
2.探索モード、攻撃モード中に、タッチセンサが反応したとき
探索モード、攻撃モードの処理中に壁に当たることはまずありえない。だから探索モード、攻撃モード中のタッチセンサの反応は、相手マシンが体当たりしてきたということになるから、この時は反応したタッチセンサの方向を向いて、またタッチセンサ反応前に行っていた処理に戻る。
(表 1)
| 反応したタッチセンサの方向 | 前 | 右 | 左 | 右上 | 右下 | 左上 | 左下 |
| 回転角度 | 右に180度 | 左に90度 | 右に90度 | 左に135度 | 右に135度 | 右に135度 | 左に135度 |
④ 攻撃モード
前面に8つつけてある赤外線センサを使って、相手の赤外線を感知したら、その方向に30cm進む。進んでいる間にも赤外線を感知したら、感知したセンサの方向に回転してまた30cm進む。相手の赤外線を感知している間は、ずっとこの処理を繰り返して相手MIRSの勝敗判定装置に体当たりする。体当たりしたときにタッチセンサが反応してしまうので、攻撃モード中は回避処理に入らず、攻撃モードの処理を繰り返す。処理中に相手の赤外線を見失ったら、相手が近くにいるかもしれないので、自分の位置を確認した上で、すばやくもう1度競技場内の原点に戻って、①探索モードを初めから行う。
以上です。