ideaAoshima
システム提案書
マシンの特徴
1、横の壁と自分の位置がわかり、敵が横を通過したことがわかる。
2、対戦相手が赤外線センサーの感知内に存在する場合それ相応に向きを変えて相手を追う。
3、少なくとも、横の進入禁止ゾーンには入らない、縦も、必ず前進することと、壁衝突後、
すぐに壁に沿わない動きで進入禁止ゾーンから回避する。
4、敵に後ろをとらせない。
5、普段は、壁に垂直かつ水平な状態で移動する。
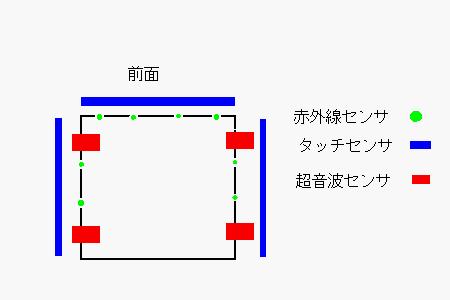
センサーの配置
1、赤外線センサーは、確実性と微妙な動きがとれるように前方に多く付けられている、それ
ぞれに対応するように動く。
2、超音波センサーは、前面の敵はわかりにくいが、横を通る敵をキャッチしやすいように、
前方と後方の左右2つずつ付けられている。この利点は横の敵を正確に捕らえることと、
壁と垂直かつ水平であることを、確かめること(位置の修正)ができる。
3、タッチセンサーは、前と横の3つに付けられるそれぞれ相応の動きをとる。
マシンの動き
1、敵をキャッチするまで前進を続ける。横の壁との位置は常に把握し、進入禁止ゾーンに位
置す る場合90度回転して広く空いた方に進む。
2、前方から後方へと超音波センサーが感知した場合、敵は後ろにまわったとみなし、
180度回転する。前、後とも、感知していれば90度敵に前を向けるように回転し、前進す
る。前だけならそれに合わせて前進、後ろだけならそれに合わせて後退して2つのセンサー
が、感知する位置に行動をとる。逃げられたら、常時の探索モードにもどる。
センサ配置図