| モーター型番 | RE025-055-34EBA200A |
| トルク定数 | 16.30(mNm/A) |
| 端子間定数 | 1.34(ohm) |
| 無負荷電流 | 53.90(mA) |
| 端子間電圧 | 7.2(V) |
| ギヤ型番 | GP026A037-0016B1A00A |
| ギヤ変速比 | 16.00:1 |
| ギヤ効率 | 76(%) |
| 周囲温度 | 25(℃) |
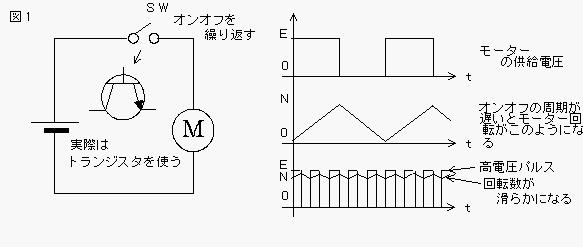 なお、モーターへのピーク電圧が電源電圧とほぼ等しくなるが、この場合、OFFの時があるので、その平均電力は低くなる。
なお、モーターへのピーク電圧が電源電圧とほぼ等しくなるが、この場合、OFFの時があるので、その平均電力は低くなる。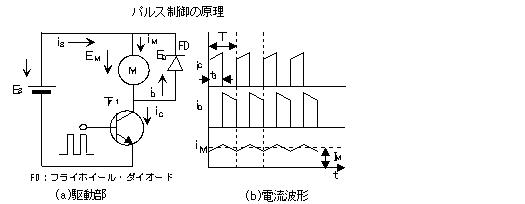
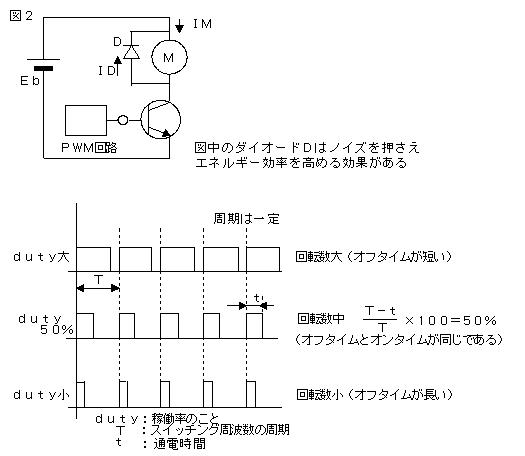 ところで、PWMを含めたパルス制御法は、電力パルスがONの時だけモーターに電流を供給する。そしてそれ以外の時は休んでいる。よって、その間はトランジスタや電源の負担が軽くなる。しかし、汚点が無いわけではない。それは、OFFの時に起こる。ご承知のとおり、モーターはコイルで出来ている。よって、それは必ずなんらかのインダクタンスを持っている。したがって、OFFの時に自己誘導作用を発生し、大きな逆起電力を誘発するこれは、制御用トランジスタを破壊するだけでなく、非常に大きな雑音を周囲に巻き散らし、ひいては大きな電磁波公害となる。これを解決したのがダイオードDで、一般にはこれをフライホイールダイオードと呼ぶ。この働きは、モーターOFF時に誘発する逆方向の電力をダイオードを介して同じモーターに回生してやることである。こうすることによって、高レベルの電気雑音が抑制される。そればかりでなく、そのエネルギーをOFFの間中モーターに流す事が出来る。よって、モーター電流が連続的になる。その結果としてエネルギー効率が上がり、なおかつモーターの動きもスムーズになる。まさにいいとこだらけ、といった感じである。
ところで、PWMを含めたパルス制御法は、電力パルスがONの時だけモーターに電流を供給する。そしてそれ以外の時は休んでいる。よって、その間はトランジスタや電源の負担が軽くなる。しかし、汚点が無いわけではない。それは、OFFの時に起こる。ご承知のとおり、モーターはコイルで出来ている。よって、それは必ずなんらかのインダクタンスを持っている。したがって、OFFの時に自己誘導作用を発生し、大きな逆起電力を誘発するこれは、制御用トランジスタを破壊するだけでなく、非常に大きな雑音を周囲に巻き散らし、ひいては大きな電磁波公害となる。これを解決したのがダイオードDで、一般にはこれをフライホイールダイオードと呼ぶ。この働きは、モーターOFF時に誘発する逆方向の電力をダイオードを介して同じモーターに回生してやることである。こうすることによって、高レベルの電気雑音が抑制される。そればかりでなく、そのエネルギーをOFFの間中モーターに流す事が出来る。よって、モーター電流が連続的になる。その結果としてエネルギー効率が上がり、なおかつモーターの動きもスムーズになる。まさにいいとこだらけ、といった感じである。
| 重量 | m |
| タイヤの直径 | d |
| 最大速度 | VMAX |
| タイヤの回転数 | X[rps]=(VMAX×1)÷(π×d) |
| 減速比 | R=[定格回転数]÷X |
| トルク | T[N]=[定格トルク×モーター個数]÷[タイヤ半径×減速比] |
| 加速度 | a[m/s2]=F÷m |
| 最大速度に達するまでの時間 | t[s]=最大速度÷加速度 |
| 減速比 | R=H/K+I/K+J/K |
参考文献
Last Update : 1996.12.20
Dep. of Electoronics and Control Enginnering