| 値が変化したセンサの場所 | 右 | 右前 | 左前 | 左 | なし |
| 右 | 10 | 10 | 11 | 11 | |
| 右前 | 9 | 7 | 7 | 8 | |
| 左前 | 6 | 6 | 4 | 5 | |
| 左 | 2 | 3 | 3 | 2 | |
| なし | 12 | 8 | 5 | 1 | 13 |
横:値の長くなったセンサ 縦:値の短くなったセンサ
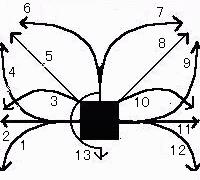
横:値の長くなったセンサ 縦:値の短くなったセンサ | |
 | 右図のように相手が 移動したとする |
| すると自機は二度の測定で下のように青と赤の値を得る | |
 |  |
 | 右図のようになるので 表からの6番の経路が選択される |
 | よって右図のように動き 相手の背後をとる |
Last Update :
Dep. of Electoronics and Control Enginnering