本機は相手の動きを観察し、相手が向いているであろう向きを予測して、本機が相手の後ろに回り込むようにする、また本機の正面が相手の勝敗判定装置と向き合うようにし、相手の後ろをとってから勝敗判定装置を押すまでの時間を短縮しチャンスをできるだけ生かし勝利するものである。
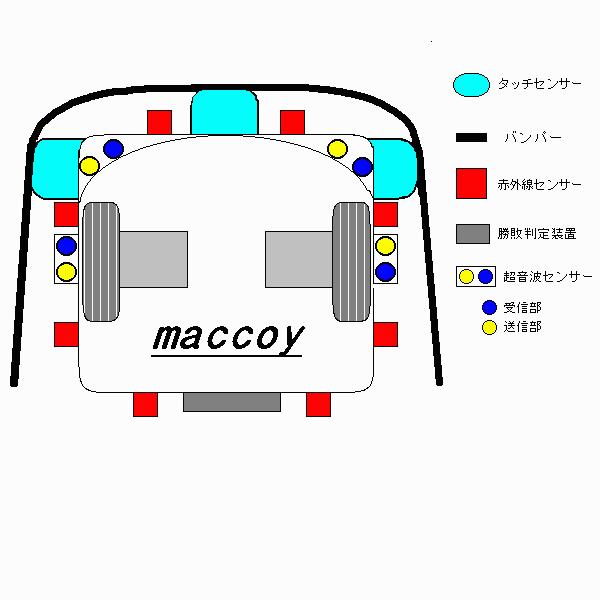 |
| 各センサーの配置は、外観を参照してください。 使用するセンサーは、タッチセンサーが3つ、赤外線センサーが8つ、超音波センサーが4対です。 超音波センサーは、探索領域が重ならないような向きに配置します。 |
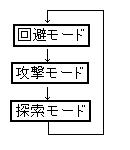 | 優先順位を回避、攻撃、探索の順にして、常に動き回れて、偶然生まれたチャンスでも最大限生かせるようにする。 |
- 回避モード
回避モードとは壁や相手に接触したさいのためモードである。
前面や側面が接触していると動きが取れないためこれ以降のモードでやることが無駄になってしまう、それを回避するための行動である。
具体的には前面に配置してあるバンパーとタッチセンサを組み合わせたもの(外観参照)を使用して、タッチセンサに反応があったら少し後退するようにする、そうして次のモードに移行する。 - 攻撃モード
攻撃モードとは相手の後ろをとったとき突撃をするのためのモードである。
具体的には赤外線センサを使う、赤外線センサに反応があったらその反応のあった赤外線センサの方を向き突撃する、その後反応がなくなるまで突撃を繰り返す、反応がなくなったら次のモードに移行する。 - 探索モード
探索モードとは相手の位置と向きを推測し、相手の後ろをとるためのモードである。
具体的には超音波センサを使う、超音波センサで少し間隔をあけて二度計測し、その一度目と二度目の計測値が変化したところを検出して、それによって相手の位置と向きを推測する、推測内容とそれに対応する行動は下図に示す。値が変化したセンサの場所 右 右前 左前 左 なし 右 10 10 11 11 右前 9 7 7 8 左前 6 6 4 5 左 2 3 3 2 なし 12 8 5 1 13
横:値の長くなったセンサ 縦:値の短くなったセンサ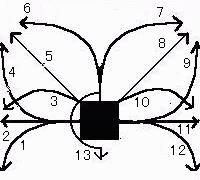
なお、二ヵ所以上変化する時は想定しないので超音波センサ同士の計測域がだぶらないようにしなければならない。
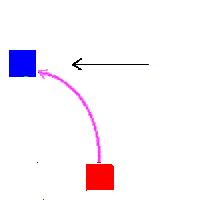
移動例を一つ示す 黒線:超音波センサが一度目に計測したときの値
緑線:超音波センサがニ度目に計測したときの値
黒矢印:相手機の移動経路
桃矢印:自機の移動経路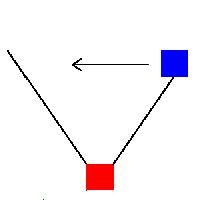
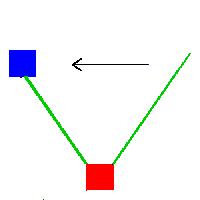
上図2つのように移動したとき自機は右のように感知している 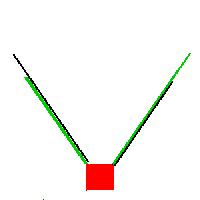
それに対して右図のように移動しようとする 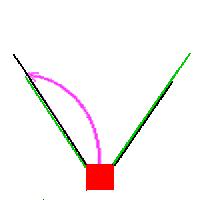
結果的には右図の様に動く