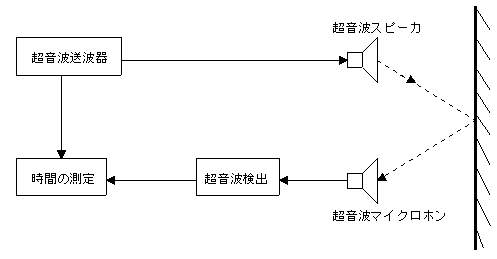
埲壓俇崁栚偵傢偨偭偰挷嵏媦傃尋媶傪峴偭偨丅
|
|
| 恾侾丂嫍棧偵傛傞壒埑偺尭悐摿惈 |
|
| 恾俀丂挻壒攇僙儞僒偺尨棟 |
丂恾俁偺峔惉偵傛傞奺晹偺攇宍偺椺偑恾係偱偁傞丅幚嵺偵偼斀幩攇偼暔懱偺宍偵傛傝僄僐乕偟偰巆傞偑丄偙偺夞楬偱偼斀幩攇偺愭摢偩偗傪専弌偟偰丄嵟傕嬤偄強偐傜偺斀幩帪娫傪偼偐傞丅恾俁偱偼敪怳婍傪巊梡偟偰偄傞偑敪怳攇宍偱側偔堦敪偺崅埑僷儖僗偱挻壒攇僗僺乕僇傪嬱摦偡傞偙偲傕偁傞丅
|
| 恾俁丂挻壒攇僙儞僒偺峔惉 |
|
| 恾係丂挻壒攇攇宍偲僞僀儈儞僌 |
丂傑偨丄斀幩帪娫傪應掕偡傞偨傔偵恾俁偺傛偆側僴乕僪僂僃傾僞僀儅傪梡偄偢丄儅僀僋儘僐儞僺儏乕僞乕偺僜僼僩僂僃傾偱僞僀儅傪峔惉偡傞偙偲傕弌棃傞丅恾俆偼僜僼僩僂僃傾僞僀儅傪梡偄偨応崌偺挻壒攇僙儞僒惂屼儖乕僠儞偺棳傟恾偱偁傞丅
|
| 恾俆丂棳傟恾 |
|
| 恾俇丂挻壒攇僩儔儞僕儏乕僒 |
丂挻壒攇傪斀幩偟偨屻懸偪帪娫傪偍偄偰偄傞偺偼挻壒攇僗僺乕僇偺怳摦偑尭悐偣偢偦偺楻傟偑庴怣夞楬偵擖偭偰庴怣攇傪専弌偟偨傛偆偵岆摦嶌偟偰偟傑偆偺傪傆偣偖偨傔偱偁傞丅
|
| 恾俈丂挻壒攇憲攇夞楬椺 |
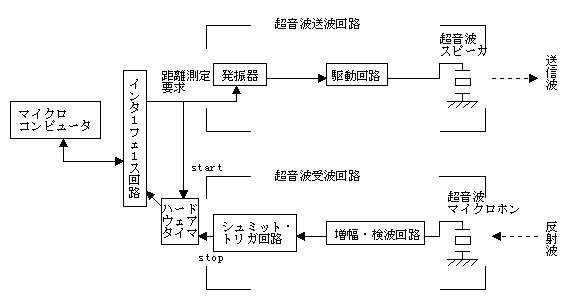
丂揹婥怣崋傪挻壒攇偵曄偊偰嬻婥拞偵敪幩偡傞挻壒攇僗僺乕僇乮憲攇婍乯偲嬻婥拞傪旘傫偱偒偨挻壒攇傪庴偗偰偦傟傪揹婥怣崋偵曄姺偡傞挻壒攇儅僀僋儘儂儞乮庴攇婍乯傪崌傢偣偰挻壒攇僩儔儞僕儏乕僒偲偄偆丅壒偼嬻婥偺怳摦偱偁傞偐傜挻壒攇僩儔儞僕儏乕僒攇揹婥怣崋傪婡夿揑怳摦偵曄偊偨傝丄偦偺媡偺栶妱傕壥偨偡丅
丂偙傟傜偺揹婥怳摦曄姺慺巕偼尨棟揑偵偼堦偮偺慺巕偑憲攇婍偵傕庴攇婍偵傕摥偔偑憲攇偲庴攇偱偼嬻婥偺怳摦怳暆偵傕戝暆偵堎側傝丄偟偐傕僀儞僺乕僟儞僗傪曄偊偨傎偆偑岠棪偑傛偄偺偱暿屄偺僩儔儞僕儏乕僒傪棙梡偡傞偺偑捠忢偱偁傞丅
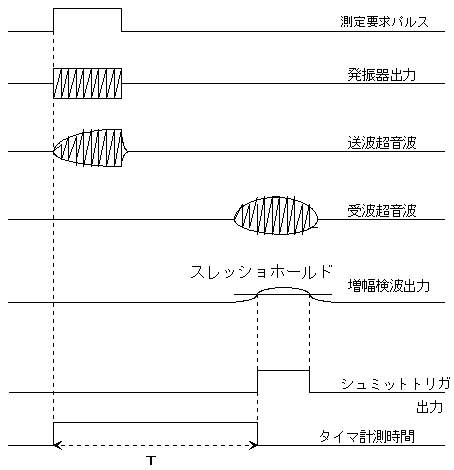
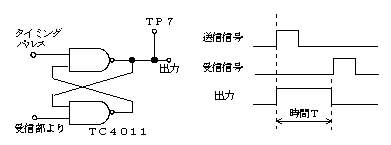
丂挻壒攇傪敪惗偡傞偨傔偺憲攇夞楬偵偼俠俵俷俽僎乕僩夞楬偵傛傞敪怳婍傗儅僀僋儘僐儞僺儏乕僞偺僋儘僢僋怣崋傪暘廃偡傞夞楬偵傛偭偰僩儔儞僕儏乕僒偺嫟怳廃攇悢偺僷儖僗楍傪偮偔傝丄偙傟偵傛傝挻壒攇僩儔儞僕儏乕僒傪嬱摦偝偣傞曽幃傪偲傞丅恾俇偼偙偺椺偱儅僀僐儞偐傜偺僐儞僩儘乕儖怣崋偑丂乭俫乭偺娫偩偗敪怳偑婲偙傝挻壒攇偑憲攇偝傟傞丅
丂挻壒攇偼丄僩儔儞僕儏乕僒偐傜堦掕偺峀偑傝傪帩偭偰價乕儉忬偵敪幩偝傟傞丄偦偺價乕儉偺宍忬傪挻壒攇僩儔儞僕儏乕僒偺巜岦惈偲尵偆丅
丂巗斕偝傟偰偄傞挻壒攇僩儔儞僕儏乕僒偺巜岦惈偼丄偦傟掱塻偔側偔丄敿抣妏偲偟偰俀侽亱乣俁侽亱掱搙偺峀偑傝傪帩偮丅
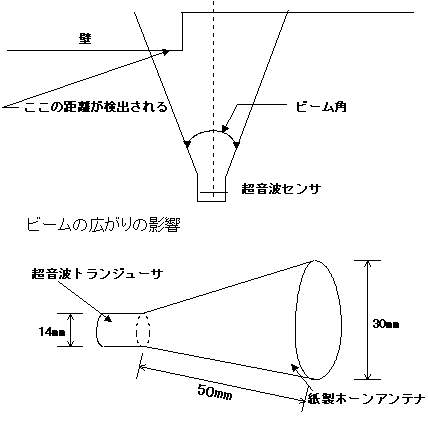
丂挻壒攇僙儞僒偺巜岦惈偑峀偄偲丄僙儞僒偵傛偭偰寁應偝傟偨懳徾暔懱偺宍偼偐側傝儃働偨傕偺偵側傞丅偡側傢偪丄挻壒攇僙儞僒偼丄嫍棧曽岦偺暘夝擻偼傛偄偑丄墶曽岦偺暘夝擻偼傛偔側偄丅偙偺巜岦惈傪夵慞偡傞曽朄偲偟偰丄僩儔儞僕儏乕僒偵儂乕儞傾儞僥僫傪庢傝晅偗傞庤抜偑偁傞丅傾儞僥僫偵偼堦斒偵巜岦惈傪塻偔偡傞偲摨帪偵丄拞怱曽岦偺僎僀儞傪偐偣偖偲偄偆棙揰偑偁傞丅偨偩偟丄儂乕儞傾儞僥僫偺愝寁傪棟榑揑偵峴側偆偙偲偼擄偟偄偺偱丄偁傞掱搙偺帋峴嶖岆偵傛偭偰儂乕儞偺宍傪寛傔傞昁梫偑偁傞丅
|
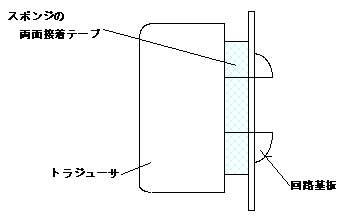
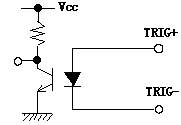
| 恾俉丂巻惈儂乕儞傾儞僥僫偺椺 |
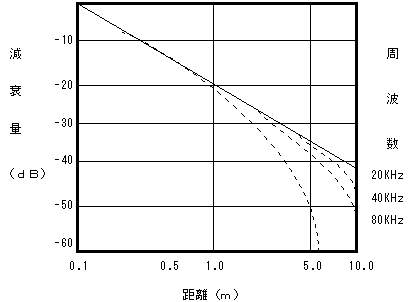
丂挻壒攇偺攇偑懳徾暔偵偁偨偭偨応崌丄懳徾暔昞柺偵撌墯偑偁傟偽偦偙偱嶶棎偟丄偁傜備傞曽岦偐傜斀幩嶖棎攇偑娤應偝傟傞丅偟偐偟丄傕偟懳徾暔偑嬀柺偵側偭偰偄傟偽丄嶖棎偣偢丄擖幩攇亖斀幩攇偺曽岦偵斀幩偡傞偩偗偲側傝丄斀幩攇偺恑峴曽岦偱偟偐斀幩攇偼専弌偝傟側偄丅
丂攇偵偲偭偰懳徾暔偑嬀柺偱偁傞偐嶖棎柺偱偁傞偐偼丄偦偺昞柺偺慹偝偲攇挿偺娭學偱寛傑傞丅嫞媄応偺暻偼悢廫倠Hz挻壒攇偵偲偭偰傎偲傫偳嬀柺偲側傞偐傜丄挻壒攇僙儞僒偱偼丄幬傔偐傜暻傪尒偨応崌丄捠忢偦偺暻偼専弌偱偒側偄丅
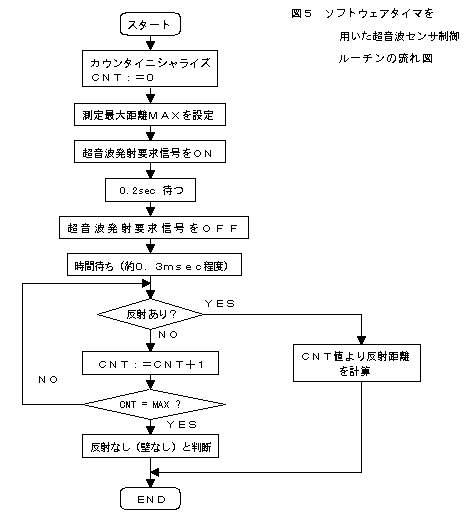
丂傑偟偰憡庤俵俬俼俽傪専弌偡傞偺偼偝傜偵擄偟偄偱偁傠偆丅帋嶌昳傪惢嶌偟丄幚尡傪偡傞昁梫偑偁傞偲巚傢傟傞丅
丂挻壒攇僙儞僒偱偼丄侾乵兪倱乶傪侽丏侾俈乵倣倣乶偵姺嶼偡傞丅偟偨偑偭偰丄僜僼僩僂僃傾僞僀儅偺侾夞偺儖乕僾偵梡偡傞帪娫傪侾侽乵兪倱乶偲偡傞偲丄俠俹倀偼偙偺娫懠偺張棟偑偱偒側偄丅僴乕僪僂僃傾僞僀儅傪梡偄傟偽丄偦偺娫傕懠偺張棟傪峴偆偙偲偑偱偒傞丅
丂僴乕僪僂僃傾僞僀儅偲偟偰偼丄偦傟偧傟偺俠俹倀偵廃曈俴俽俬偲偟偰弨旛偝傟偰偄傞僞僀儅梡俬俠傪巊偆偺偑娙扨偱偁傞丅僋儘僢僋敪惗夞楬偲儅僀僐儞偐傜撉傓偙偲偺偱偒傞僇僂儞僞夞楬傪峔惉偡傟偽偦傟偱廩暘偱偁傞丅
|
| 恾俋丂婎斅傊挻壒攇僩儔儞僕儏乕僒傪庢傝晅偗傞曽朄偺堦椺 |
亙拲侾亜僪儕僼僩
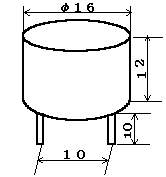
丂丂丂挻壒攇僙儞僒偺掕奿
| 峔憿 | 憲怣丒庴怣愱梡 乮俼丗庴怣梡丂俽丗憲怣梡乯 |
| 昳柤 | 俵俙係侽俛俆俼乛俽 |
| 摿挜 | 杴梡丒峀懷堟 |
| 岞徧廃攇悢/TD> | 係侽倠俫倸 |
| 姶搙 | 亅係俈倓俛埲忋 |
| 壒埑 | 侾侾俀倓俛埲忋 |
| 巜岦惈乮敿堟慡妏乯 | 俆侽亱 |
| 惷揹梕検 | 俀侽侽侽倫俥 |
| 暘夝擻 | 俋 |
| 専抦嫍棧 | 侽丏俀乣俇丏侽倣 |
|
| 恾侾侽丂俵俙係侽俛俆俼乛俽 |
丂丂丂丂丂丂丂丂丂
|
| 恾侾侾丂僷儖僗 |
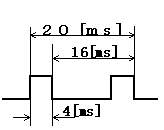
丂僇僂儞僩偼俹俠偑弌椡廃婜俀侽[ms]偺僷儖僗怣崋傪僩儕僈偲偟偰僇僂儞 僩傪奐巒偡傞丅摉慠庴怣怣崋偑侾俇[ms]埲忋偺傕偺偼庴怣偱偒側偄丅廬偭 偰應掕偼侾俇[ms]偱懪偪愗傞偙偲偵側傞丅偦偔偰偄傪侾俇[ms]偱懪偪愗偭 偰傕丄壒懍偼俁係俇[m/s]偩偐傜丄挻壒攇偼俆丏俆[m]恑傓丅應掕偼曉偭偰 偒偨斀幩攇偩偐傜俆丏俆乛俀亖俀丏俈俆[m]傑偱應掕偱偒傞丅偙傟偼嫞媄 応撪偺嵟戝偺挿偝傪忋夞偭偰偄傞偺偱戝忎晇偱偁傞丅
丂挻壒攇偺攇挿偼俉丏俇[mm]偱偁傞偐傜栺侾[cm]偺惛搙埲忋偱偺應掕偼偱
偒側偄丅挻壒攇偺懍搙偼俁係俇侽[cm/s]偱偁傞偐傜侾[cm]傪恑傓偺偵栺俁侽[us]偐偐傞丅挻壒攇應掕偼挻壒攇偑峴偭偰曉偭偰偒偨傕偺傪専弌偡傞偺
偩偐傜丄侾[cm]偺應掕傪偡傞偺偵僇僂儞僞偼侾僇僂儞僩俀[cm]偱偁傟偽傛
偄丅傛偭偰應掕僷儖僗偼俇侽[us]偺廃婜偵偡傞丅
丂應掕帪娫偼侾俇[ms]偱懪偪愗傝側偺偱侾俇[ms]乛侾侽[us]亖俀俇俇丏俇偲
側傝丄廬偭偰俀俇俈僇僂儞僩慜屻偺僇僂儞僞傪昁梫偲偡傞丅
丂俉倐倝倲僇僂儞僞偼俀俆俇僇僂儞僩偱傎傏傛偄悢偱偁傞丅傛偭偰俉倐倝倲僇僂儞僞傪巊梡偡傞丅
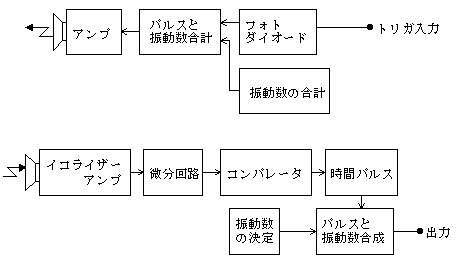
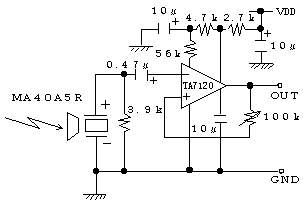
丂僔乕働儞僒乕偵傛傞僷儖僗傪僼僅僇僾儔傪捠偟偰揱偊丄偦偺忣曬乮堦敪僷儖僗乯偲僋儘僢僋乮係侽kHz乯偲傪崌惉偟偰憲怣晹偐傜挻壒攇傪敪幩偡傞丅
丂斀幩偟偰栠偭偰偒偨挻壒攇傪憲怣晹偱僉儍僢僠偟丄僐儞僷儗乕僞傪捠偟偰丄嬤嫍棧偺晄梫側斀幩攇傪僉儍儞僙儖偟丄挻壒攇斀幩帪娫偺忣曬傪僇僂儞僞傊憲傞丅
|
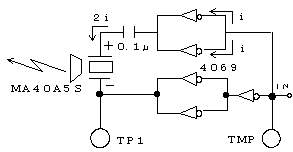
丂岝僄僱儖僊乕傪揹婥僄僱儖僊乕偵曄姺偡傞僼僅僩僟僀僆乕僪偼敿摫懱偺俹俶愙崌晹偵岝偑摉偨傞偲揹埵嵎偑惗偠傞丅岝尮揹椡岠壥傪棙梡偟偨岝専弌婍乮僼僅僩僙儞僒乯偱偁傞丅
|
嘇 怳摦悢偺寛掕
|

|
俼侾偑壜曄掞峈偵側偭偰偄傞偺偱旝挷惍傪峴偄丄係侽俲俫倸偵崌傢偣傞丅
嘊 僷儖僗偲怳摦悢攇偲偺崌惉
|
嘋 怣崋憹暆晹
|
嘍僀僐儔僀僓乕傾儞僾
|
嘐 旝暘夞楬
|
揹埑偺俢俠暘偱僇僢僩偡傞丅
嘑 僐儞僷儗乕僞
|
丂傾僫儘僌検偺怣崋傪僨傿僕僞儖壔偡傞偨傔偺夞楬偱僗儗僢僔儑儖僪儗儀儖傪嫬偵偟偰丄偦傟埲忋側傜俫倝倗倛儗儀儖丄埲壓側傜俴倧倵儗儀儖偵俀恑壔偟偰偄傞丅僐儞僷儗乕僞偵偼俀偮偺擖椡僺儞偑偁偭偰亄偲亅傑偨偼俼俤俥丄俬俶倁偲偄偆婰崋偑偮偄偰偄傞丅
丂亄乮俼俤俥乯僺儞偺揹埑偑亅乮俬俶倁乯僺儞偺揹埑傛傝戝偒偗傟偽弌椡偼摨嬌惈偺曽岦乮俫倝倗倛儗儀儖乯偵怳傟丄亅僺儞偺曽偑亄僺儞偺揹埑傛傝傕戝偒偄偲弌椡偼媡嬌惈偺曽岦乮俴倧倵儗儀儖乯偵怳傟傞丅弌椡偺堦晹傪擖椡偵朳偟丄億僕僥傿僽僼傿乕僪僶僢僋傪峴偭偰偄傞丅
丂俁俋俲兌偺掞峈偵傛偭偰僸僗僥儕儞僌僗傪偮偔偭偰偄傞丅侾侽兪俥偺僐儞僨儞僒偼儕僢僾僲僀僘傪僶僀僷僗偝偣丄揹棳僀儞僺乕僟儞僗傪壓偘偰偄傞丅
嘒 帪娫僷儖僗
|
亙嶲峫暥專亜