開発システムの概要
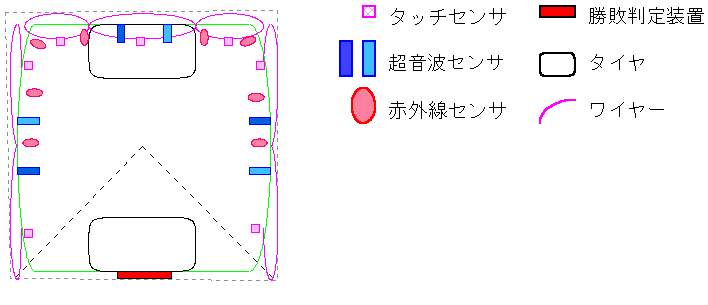
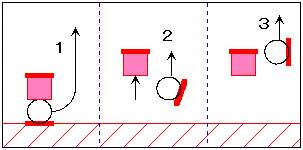
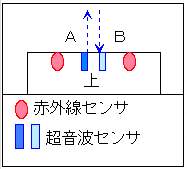
<マシンの外観> マシンの外観図をfig.1に示す。
 |
| fig.1 |
マシンの外観の特徴:
・タイヤの向きを左右方向に配置。
・タッチセンサで7ヵ所の接触を感知する。
・各センサについての詳細は、「5-基本機能」を参照。
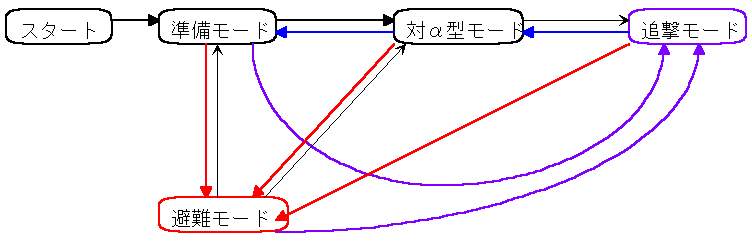
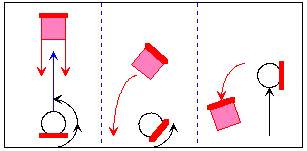
<マシンの動き> マシンの各モード間の関係をfig.2に示す。
 |
| fig.2 |
<モードの流れ>
1:準備モードで得られる情報を基に、対α型モードを選択し実行する。
2:マシンが<危険>を感じたら避難モードを即実行する。
3:赤外線センサに反応を感じたら追撃モードを実行する。
4:対α型モードが有効でないと悟ったら、準備モードに戻る。
<各モードについて>
(各モードに共通する事項)
「自機の安全」
マシンの後ろ、勝敗判定装置側にはセンサ類が無く、ここに相手に回り込まれると相手の存在を確認できず非常に危険である。従って相手が回り込む前、その可能性が感じられた時を「危険」と称してその対策をとる、それが「避難モード」である。
「危険」
このマシンの特長として、相手が自機の後ろに回り込む為には、自機が左右に伸ばす超音波センサの線(ディフェンスライン)を必ず通らねばならない事がある。従って相手が回りこむ際には、相手が一度ディフェンスライン上に見え、そして相手が消えるのが知らされる。これを「危険」な状態ととる。また右下左下に設置する、勝敗判定装置の両サイド2つのタッチセンサに相手が触れる事も「危険」な状態ととる。
「自機の位置」
移動中、度々超音波センサにより壁と自機との距離を知る機会がある。この時その値より自機の座標を割り出すことができる。この機会と機会の空白帯では、シャフトエンコーダから知る各タイヤの回転数より自機の座標を算出することができる。各モードにおいて、常に座標を算出し続け、超音波センサから得る値で随時修正する。この事により、超音波センサからの値を相手によるものか壁によるものか識別できる。
※ 相手マシンが超音波センサから周期的に発する超音波の波をかい潜って、「ディフェンライン」をすり抜けることはできないものとする。
※ 超音波センサから近距離(10cm程)に相手や壁を感知できない穴がある。「ディフェンスライン」においてはタッチセンサがこの穴を補ってくれる可能性がある。
(準備モードについて)
- このモードはスタート直後に必らず実行される。
- このモードは防御重視の姿勢をとり、「自機の安全」を最優先する。
- このモードは度々知る「相手の位置」から相手の行動パターンを分類し、用意 された「対α型モード」を選択する。
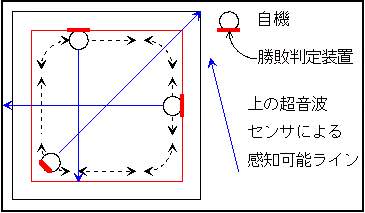
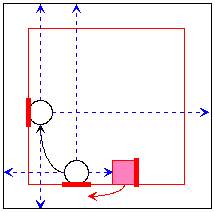
このモードのマシンの運動をfig.3に示す。
 |
| fig.3 |
1.通常時
- まず片方向の巡回運動をする。
- 勝敗判定装置を常に進入禁止ゾーンを向けたまま運動する。
- 上、または左右の超音波センサで度々相手の位置を知る。
- 相手が進行方向にいるときは、待機、または逆方向の巡回運動をする。
- 相手の衝突はタッチセンサで感知し逆方向の巡回運動をする。
2.調査時
3.完了時
- 相手の行動パターンの分類が完了次第「対α型モード」実行する。
4.危険時、発見時
- 「危険」状態を悟ったり相手の勝敗判定措置を発見した場合、強制的に非難運動モードを実行する。
各時の運動についての優先順位: 危険時、発見時>完了時>調査時>通常時
相手の行動パターンの分類例
- 相手の近くをすれ違うと時々赤外線センサに反応がある。 > 回り込みにたいする防御が不安定 > 回り込み有効型
- すぐに突っ込んでくる。 > 追跡力あり > 突進型
- 自機停止中、正面の相手がある程度接近して来て消え、横のラインに表れる。 > 回りこみに熱心、確実に回り込んでくる > 回り込み型
- ある程度以上近づけない。 > 間合いをとってきて、しかもしっかりした防御 > 慎重型
- 接近しようと接触しようと相手は全く動いていない。 > 故障して動けない? > 故障型
6、7、8、、、等
next
(対α型モードについて)
- このモードは準備モードを経て実行される。
- このモードは赤外線センサによる相手の勝敗判定装置の発見を目的とする。
- このモードは上の目的がより小さい危険でより速く達成されるように、様々な動 きの中から特に相手マシンに対して有効なものを実行するものである。但し、相 手マシンは準備モードでα型などと分類され、それに有効な動きというのはあらかじめ「対α型モード」として用意されている。
- このモードは対α型モードが有効でない場合、終了して準備モードに戻る。
幾つかの「対α型モード」の例
1、対 回り込み有効型
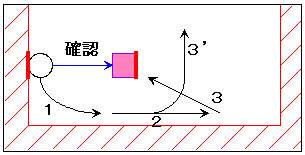 |
| fig.4 |
- 回り込みに弱いならば、図のように回り込みの動作を積極的に繰り返す。
- 巡回運動で上の超音波センサで相手の位置を確認し、その座標付近を走り抜けて勝敗判定装置を探る。走り抜ける際上の超音波センサで相手の位置を確認し、走り抜けた後、更に相手側に曲がる事もある。
2、対 突進型
 |
| fig.5 |
- 突進型の正面に位置した時、相手が自分を見つけて突進してくるのを待つ。相手と接触した瞬間、図のように相手の側面を走り抜ける。相手が止まってる時や、あまりの近距離で相手の超音波センサが不安定になった時などに勝敗判定装置が見える可能性がある。
3、対 回り込み型
 |
| fig.6 |
- 準備モード調査時に相手が回りむ方向を調べておき、相手を正面に捕らえたら自機を停止させ相手の接近を待つ。相手が回り込みを始めたら図のように相手から自機の勝敗判定装置を隠しつつ回り込みを空かす。相手は勝敗判定装置を自機から隠しつつ回り込む事は出来ない。それはこちらのマシンの特長である。
4、5、6、、、等
- ここでこれらを対α型モードの通常時と称し、他に準備モード同様に危険時、発 見時を定義し、準備モードへ戻る失敗時を含めて各時の優先順位をに示す。
危険時、発見時 > 失敗時 > 通常時
(避難モードについて)
- このモードは相手に自機の後をとられる可能性のある時(危険時)実行される。従って他のどのモードからもこのモードが実行される。
- このモードの目的は相手の回り込みの可能性をなくす事(危険状態からの脱出) である。その目的が完了次第、このモードを呼び出したモードへ戻る。但し、追 撃モードからこのモードに移った場合は、その追撃モードを呼び出したモードへ戻る。
- このモードは目的を果たす為にマシンの状況により異なった動きをする。
幾つかのマシンの在る状況での動きについて
1、巡回運動において「危険」を悟った場合
 |
| fig.7 |
- 危険を察した方向と逆方向へ全力で逃げ続ける。
- そして超音波センサのいずれかが相手を感知すれば目的完了である。必要によっては、ある程度距離おいて相手を感知した時目的完了とする。
- このとき相手が勝敗判定装置を押す為には、自機より大周りの軌道を描かねばならず、やがて相手は勝敗判定装置を見失うと考えられる。
2、モードの動きの上で、自機の勝敗判定装置が進入禁止ゾーンを向いてない時に「危険」を悟った場合
 |
| fig.8 |
- 勝敗判定装置が進入禁止ラインに平行である場合、Aのように仮想の進入禁止ラインを設け、それに沿って移動し、巡回運動に合流する。
- 勝敗判定装置が進入禁止ラインと角度を持つ場合、仮想の進入禁止ラインのかどを設け、それに沿って移動し巡回運動に合流する。
- 自機が進入禁止ラインに接している場合、上の二つの動きは不可能なのでその場回転をし、巡回運動に合流できる時点でその場を離れる。
- それぞれの移動、回転は相手に対して逆方向とし、巡回運動に合流後は1、同様の運動をする。
3、4、、等
(追撃モードについて)
- このモードは自機の赤外線センサによる相手の勝敗判定装置の「発見時」に実行される。従って他のどのモードからもこのモードが実行される。
- このモードは赤外線センサからの情報を基に、自機を相手の勝敗判定装置へと導 き、勝敗判定装置との距離を縮め、勝敗判定装置を押す事を目的に持つ。
- このモードは相手の勝敗判定装置を完全に見失った時を「失敗時」とし、この モードを呼び出したモードへ戻る。但し、避難モードからこのモードへ移った場合、その避難モードを呼び出したモードへ移る。
反応があった赤外線センサの位置とそれに対応する動きを次に示す。
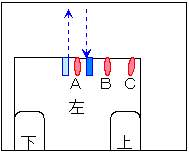
1、上側の赤外線センサに反応があった場合
 |
| fig.9 |
- AB共に反応があった場合、その場回転をして左右の赤外線センサの密な部分を相手に向ける。
- Aに反応があり超音波センサにも反応があった場合、左方向に少し進んでから反時計周りをして自機の右側で相手を捕らえる。超音波センサに反応が無い場合、右方向に少し進んでから時計周りをして自機の左側で相手を捕らえる。(勝敗判定装置の正面に自機を位置したいために1度相手から離れる)(Bについても同様)
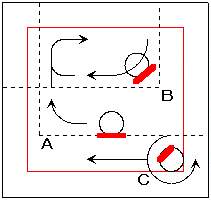
2、側面(説明は左側)の赤外線センサに反応があった場合
 |
| fig.10 |
- 基本的にABC3つのセンサの中央に相手の勝敗判定装置を捕らえながら接近する。
- 反応するセンサがAB、BCのように一方に片寄ったら前進しながらもそちらへ曲がる。
- 反応するセンサがA、Bのように極端に片寄ったら前進に対する曲がる割合を高くする。特にそれがAの場合は逆に自機が回り込まれる可能性が高くなるのでよりその場回転に近い曲がり方をする。
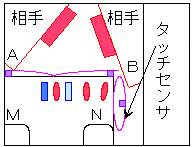
3、超近距離においてタッチセンサの反応があった場合
 |
| fig.11 |
- Aのタッチセンサが反応し赤外線センサの反応もある場合、タイヤMを固定しタイヤNのみ前進させる事により側面に大きな弧を描かせる、それにより勝敗判定装置を押す事ができる可能性が高い。(Bについても同様)
- 失敗時:見失ってもその場回転で相手を捜す。超音波センサに相手が反応するが 赤外線センサに反応がない場合、諦めて避難モードの動きでこのモードを終了する。