|
|
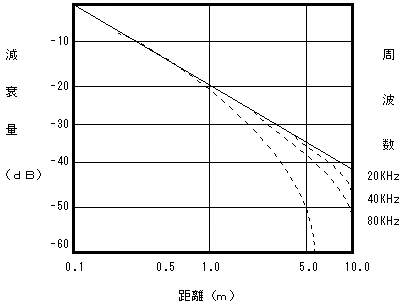
| 図1 距離による音圧の減衰特性 |
|
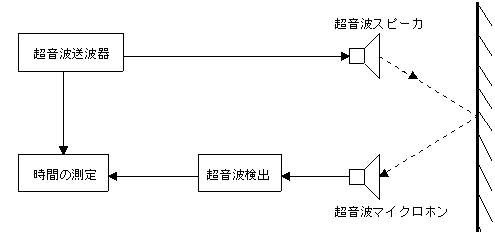
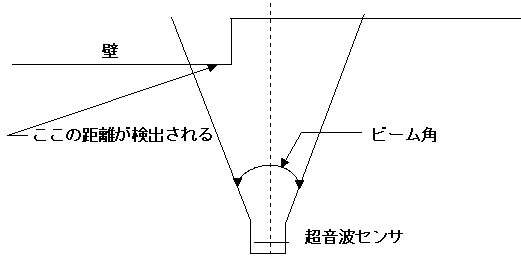
| 図2 超音波センサの原理 |
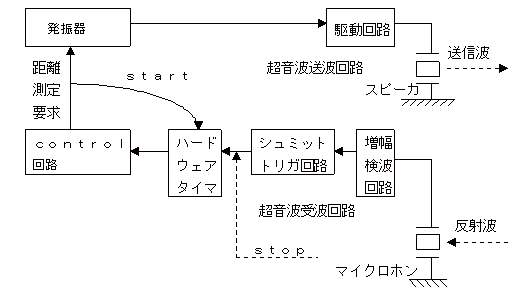
図3の構成による各部の波形の例が図4である。実際には反射波は物体の形によりエコーして残るが、この回路では反射波の先頭だけを検出して、最も近い所からの反射時間をはかる。図3では発振器を使用しているが発振波形でなく一発の高圧パルスで超音波スピーカを駆動することもある。
|
| 図3 超音波センサの構成 |
|
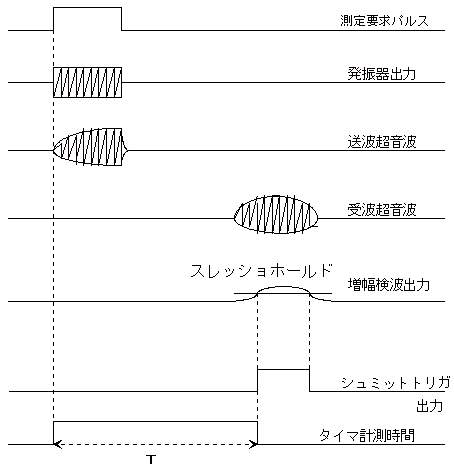
| 図4 超音波波形とタイミング |
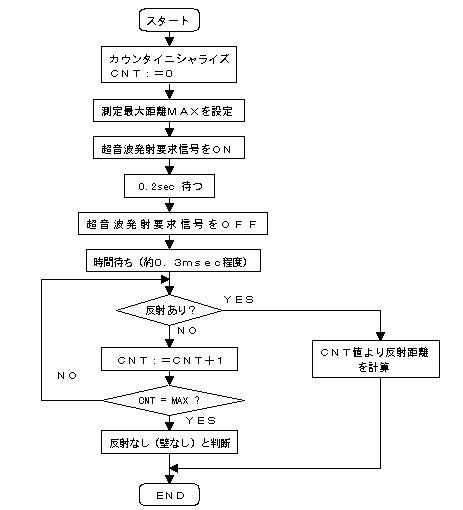
また、反射時間を測定するために図3のようなハードウェアタイマを用いず、マイクロコンピューターのソフトウェアでタイマを構成することも出来る。図5はソフトウェアタイマを用いた場合の超音波センサ制御ルーチンの流れ図である。
|
| 図5 ソフトウェアタイマを用いた超音波センサ制御ルーチンの流れ図 |
|
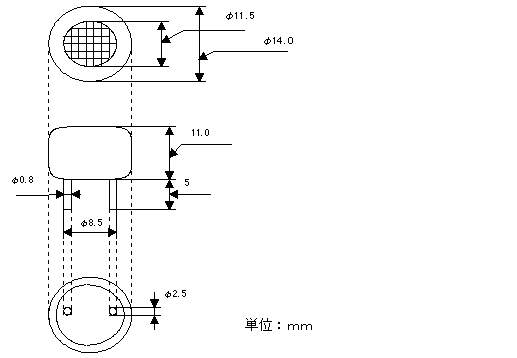
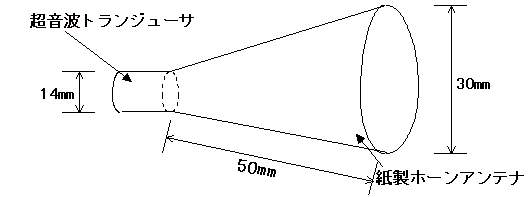
| 図6 超音波トランジューサ |
超音波を反射した後待ち時間をおいているのは超音波スピーカの振動が減衰せずその漏れが受信回路に入って受信波を検出したように誤動作してしまうのをふせぐためである。
|
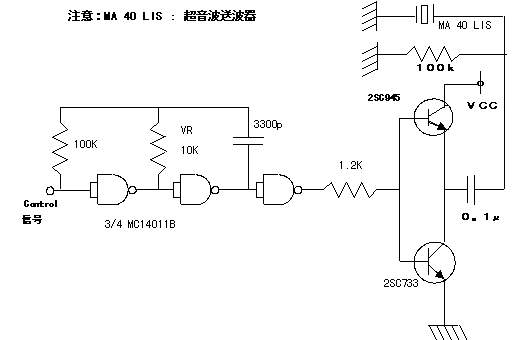
| 図7 超音波送波回路例 |
電気信号を超音波に変えて空気中に発射する超音波スピーカ(送波器)と空気中を飛んできた超音波を受けてそれを電気信号に変換する超音波マイクロホン(受波器)を合わせて超音波トランジューサという。音は空気の振動であるから超音波トランジューサ波電気信号を機械的振動に変えたり、その逆の役割も果たす。
これらの電気振動変換素子は原理的には一つの素子が送波器にも受波器にも働くが送波と受波では空気の振動振幅にも大幅に異なり、しかもインピーダンスを変えたほうが効率がよいので別個のトランジューサを利用するのが通常である。
超音波を発生するための送波回路にはCMOSゲート回路による発振器やマイクロコンピュータのクロック信号を分周する回路によってトランジューサの共振周波数のパルス列をつくり、これにより超音波トランジューサを駆動させる方式をとる。Fig3.6はこの例でマイコンからのコントロール信号が ”H”の間だけ発振が起こり超音波が送波される。
|
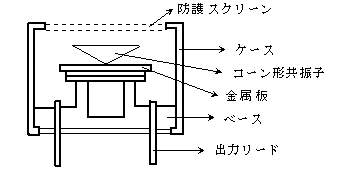
| センサーの外観 |
|
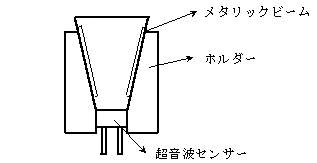
| センサーの内部構造 |
超音波は、トランジューサから一定の広がりを持ってビーム状に発射される、そのビームの形状を超音波トランジューサの指向性と言う。
市販されている超音波トランジューサの指向性は、それ程鋭くなく、半値角として20°~30°程度の広がりを持つ。
超音波センサの指向性が広いと、センサによって計測された対象物体の形はかなりボケたものになる。すなわち、超音波センサは、距離方向の分解能はよいが、横方向の分解能はよくない。この指向性を改善する方法として、トランジューサにホーンアンテナを取り付ける手段がある。アンテナには一般に指向性を鋭くすると同時に、中心方向のゲインをかせぐという利点がある。ただし、ホーンアンテナの設計を理論的に行なうことは難しいので、ある程度の試行錯誤によってホーンの形を決める必要がある。
|
| ビームの広がりの影響 |
|
| 紙性ホーンアンテナの例 |
超音波の波が対象物にあたった場合、対象物表面に凸凹があればそこで散乱し、あらゆる方向から反射錯乱波が観測される。しかし、もし対象物が鏡面になっていれば、錯乱せず、入射波=反射波の方向に反射するだけとなり、反射波の進行方向でしか反射波は検出されない。
波にとって対象物が鏡面であるか錯乱面であるかは、その表面の粗さと波長の関係で決まる。競技場の壁は数十kHz超音波にとってほとんど鏡面となるから、超音波センサでは、斜めから壁を見た場合、通常その壁は検出できない。
まして相手MIRSを検出するのはさらに難しいであろう。試作品を製作し、実験をする必要があると思われる。
超音波センサでは、1[μs]を0.17[mm]に換算する。したがって、ソフトウェアタイマの1回のループに用する時間を10[μs]とすると、CPUはこの間他の処理ができない。ハードウェアタイマを用いれば、その間も他の処理を行うことができる。
ハードウェアタイマとしては、それぞれのCPUに周辺LSIとして準備されているタイマ用ICを使うのが簡単である。クロック発生回路とマイコンから読むことのできるカウンタ回路を構成すればそれで充分である。
|
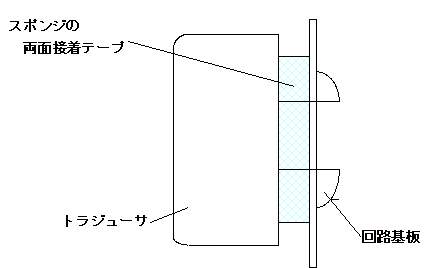
| fig5 基板へ超音波トランジューサを取り付ける方法の一例 |
<注1>ドリフト
直接結合増幅回路は直流信号まで増幅できる。それゆえ、温度や電源電圧の変化によってICBOやVBE等が変化し、コレクタ電流が変化した場合、これを信号直流分と区別できない。入力の変動に原因せずに、電流が変動する現象をドリフトと呼ぶ。
(R:受信用 S:送信用) | |