
丂堦斒揑偵尵偆捈棳儌乕僞乕偱偁傝丄捈棳揹尮偱夞偡偙偲偑偱偒傞丅俢俠儌乕僞乕偼惂屼梡儌乕僞乕偲偟偰旕忢偵桪傟偨夞揮摿惈傪桳偟偰偄傞丅椺偊偽丄戝偒側婲摦僩儖僋丄揹埑曄壔偵懳偡傞儕僯傾側夞揮摿惈丄擖椡揹棳偵懳偡傞弌椡僩儖僋偺捈慄惈丄弌椡岠棪偺椙偝丒丒丒側偳偲偍傛偦惂屼梡儌乕僞乕偵梫媮偝傟傞偡傋偰偺惈擻傪寭偹旛偊偨儌乕僞乕偲偄偊傞丅
仸僩儖僋偲偼丄儌乕僞乕偺夞揮椡偺偙偲偱偁傝丄偙傟偑戝偒偄傎偳偦偺弌椡僷儚乕傕戝偒偔側傞丅偙偙偱僩儖僋偲偼擔杮岅偵栿偡偲夞揮椡偲偄偆偙偲偵側傞偑丄偙偺僩儖僋偼捈慄塣摦偵偍偗傞悇恑椡偵憡摉偡傞丅傑偨丄僩儖僋偺扨埵偼乵倠倗倖丒倣乶偱昞偝傟傞偑丄偙傟傪俽俬扨埵宯偵側偍偡偲乵俶丒倣乶偵側傞丅
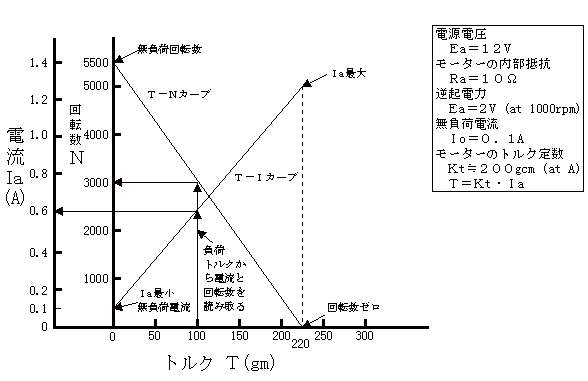
丂揹尮揹埑偑儌乕僞乕偵嫙媼偝傟偰偄傞帪偺娭學幃偼丄
丂丂丂丂丂俤倎亖俼倎亊俬倎亄俤們
丂俤倎偑嫙媼偝傟偨捈屻偼儌乕僞乕偑夞揮偟偰偄側偄偺偱丄俤們偼侽偱偁傞丅廬偭偰
儌乕僞乕婲摦帪偺幃偼丄
|
|
丂丂丂丂丂俤倎亖俼倎亊俬倎
丂丂丂丂丂俬倎亖俤倎亐俼倎
偱偁傞丅俬倎偼丄偙偺儌乕僞乕偺婲摦帪偺揹棳偱偁傝丄偙傟偑偙偺儌乕僞乕偺嵟戝揹棳偱偁傞丅乮偙偺帪儌乕僞乕偼嵟戝僩儖僋傪惗偠傞丅嵟戝僩儖僋傪惗偠傞偺偼偙偺帪偲夁晧壸偱摦偗側偄帪偱偁傝丄夁晧壸偑嵟戝僩儖僋傪忋夞偭偰偄偰婲摦偱偒側偄帪丄丂倂亖俬倎俀亊俼倎丂偺僕儏乕儖擬傪惗偠丄偦偺擬偵傛傝儌乕僞乕傪懝彎偡傞嫲傟偑偁傞丅
丂廬偭偰丄晧壸偼嵟戝僩儖僋偺俁侽乣俆侽亾埵偵偡傞丅乯
丂儌乕僞乕僩儖僋俿偼堦斒偵丄儌乕僞乕帺恎偺僩儖僋掕悢傪俲倲偲偡傞偲丄棳傟傞揹棳俬倎偵斾椺偡傞丅
丂丂丂丂丂俿亖俲倲亊俬倎
偙傟傛傝丄儌乕僞乕偵棳傟傞揹棳偼丄
丂丂丂丂丂俬倎亖俿亐俲倲
偲側傞丅枖丄儌乕僞乕偺夞揮悢俶偼丄媡婲揹埑俤們偲傎傏斾椺偡傞丅
丂丂丂丂丂俤們(N)亖俤倎亅俼倎亊俬倎 傛傝丄
丂丂丂丂丂俶亖俤們(N)乛(俤們亐俶')
[俤們(N)丗儌乕僞乕巇條偺媡婲揹埑俠[V]乮俶'[倰倫倣]乯乶
偲偄偆娭學偑偁傞丅
丂
丒丂儌乕僞乕偺揹婥揑帪掕悢冄倕傪彫偝偔偡傞丅
丂丂丂丂丂冄倕俴乛俼倎丂乮俴丗摍壙僀儞僟僋僞儞僗丄俼倎丗姫慄掞峈乯
偙傟傛傝丄摍壙僀儞僟僋僞儞僗偱偁傟偽傛偄帠偑暘偐傞丅
|
| 儌乕僞乕偺T-N,T-I嬋慄 |
丒丂婡夿揑帪掕悢冄倣傪彫偝偔偡傞丅
丂丂丂丂丂冄倣亖(俰倣丒)乛(俲倕丒俲倲乯
丂丂丂丂丂丂丂丂丂丂丂乮俰倣丗儘乕僞僀僫乕僔儍丄俲倕丗偓傖偔婲揹椡掕悢
丂丂丂丂丂丂丂丂丂丂丂丂丂俼倎丗揹婡巕姫慄掞峈丄俲倲丗僩儖僋掕悢乯
丂丂丂廬偭偰丄俰倣丄俼倎偼彫偝偔丄俲倕丄俲倲傪戝偒偔偡傟偽傛偄丅
丒丂俶亅俿僇乕僽偺儕僯傾儕僥傿傪傛偔偡傞丅棟憐揑偵偼丄俬偲俶偼斾椺丄俿偲俶偼媡偺斾椺娭學偵側傞偑丄幚嵺偼丄俶偺忋尷偱摿惈偑嬋偑偭偨傝壓尷偱儕僾儖傪惗偠傞丅廬偭偰丄懡僗儘僢僩宆丄僗儘僢僩儗僗宆偺儌乕僞乕傪慖傇昁梫偑偁傞丅
丂
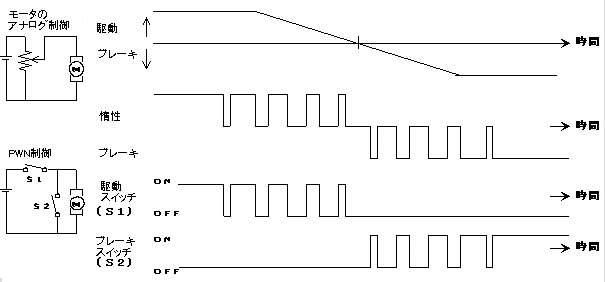
丂俹倂俵乮俹ulse丂倂idth丂俵odulation乯夞楬偲偼丄廃婜偼堦掕偱丄擖椡怣崋乮俢俠儗儀儖乯偺 戝偒偝偵墳偠偰丄僷儖僗暆偺僨儏亅僥傿丒僒僀僋儖乮僷儖僗暆偺俫偲俴偺斾乯傪曄偊丄儌乕僞乕傪惂屼偡傞夞楬偱傪惂屼偡傞夞楬偱偵偨偄偟偰丄偙傟偼朞榓乮僗僀僢僠儞僌乯椞堟偱偺惂屼偲側傞丅
丂廬偭偰丄僷儚乕丒僩儔儞僕僗僞傪朞榓椞堟偱巊梡偡傞堊丄揹椡儘僗偑寉尭偝傟丄僩儔儞僕僗僞傕偦傟掱敪擬偟側偄丅峏偵昁梫側帪娫偩偗捠揹偟傑偡偺偱丄儌乕僞丒僪儔僀僽夞楬慡懱偺岠棪偑偁偑傝丄揹埑偺晧扴傕寉偔側傞丅
丂僷儖僗惂屼朄偼儌乕僞偺僆儞僆僼惂屼傪僷儖僗偵傛偭偰峴偆曽朄偱偁傞丅偙傟偵傛傝僆僼僞僀儉偱偺揹抮偺徚栒偑慡偔側偔側傞丅傑偨僆儞僞僀儉偱傕惂屼僩儔儞僕僗僞偑姰慡偵朞榓偟偰偄傞偺偱丄偙偙偱偺揹椡儘僗傕嵟彫尷偵梷偊傜傟丄僩儔儞僕僗僞偺揹椡儘僗偑挊偟偔寉尭偝傟傞丅
丂偟偐偟丄僷儖僗嬱摦偵傛傞儌乕僞偺怳摦壒丄僽儔僔丄僐僔儏僥乕僞偺挊偟偄杹栒丄偦傟偵揹婥僲僀僘偺敪惗摍偺偄傠偄傠側栤戣傪書偊偰偄傞丅壓偺恾偼僷儖僗惂屼朄偺尨棟恾偱偁傞丅
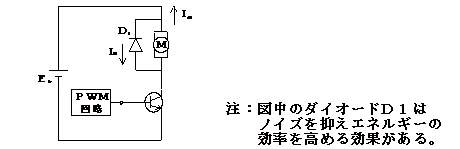
丂側偍慜儁乕僕偺夞楬偱偼丄儌乕僞傊偺僺乕僋揹埑偑揹尮揹埑偲傎傏摨偠偵側傞偑丄偙偺応崌丄僆僼僞僀儉偑偁傞偺偱偦偺暯嬒揹椡偼掅偔側傞丅
|
| 僷儖僗惂屼朄偺尨棟恾 |
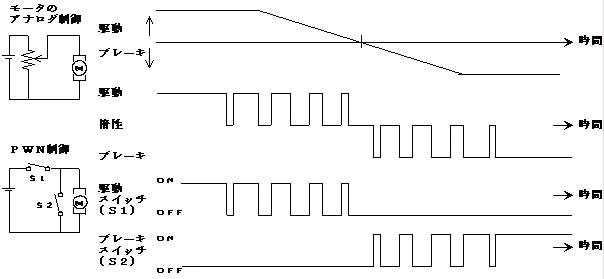
丂丂丂師偵PWM惂屼夞楬恾傪帵偡丅
|
| PMW惂屼夞楬恾 |
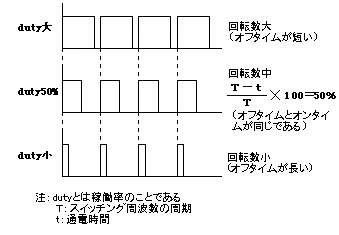
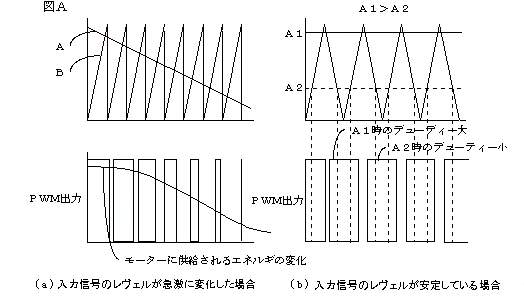
丂壓偺恾偼丄俁偮偺僷儖僗暆偵偮偄偰愢柧偟偰偄傞丅
丂堦斣忋偑僨儏乕僥傿戝偱丄僄僱儖僊乕偑嵟傕戝偒偔丄夞揮悢傕偙傟偵墳偠偰崅偔側傞丅
丂側偍丄偙偺帪僆僼僞僀儉偑嵟傕抁偄丅
|
| 僷儖僗暆偵偮偄偰 |
|
|
丂俙恾偼俹倂俵惂屼偺攇宍傪帵偟偨傕偺偱偁傞丅恾乮倎乯偼怣崋俙偑媫寖偵曄壔偟偨応崌偺丄揹椡曄壔偺偁傞僷儖僗楍偲側傞丅偙傟傛傝丄儌乕僞乕偵嫙媼偝傟傞僄僱儖僊曄壔偺條巕偑暘偐傞丅
|
| 僞僀儅俬俠偵傛傞俹倂俵僷儖僗 |
丂1kHz偺婎杮廃婜偼奜晹敪怣婡偱敪惗偝偣丄偦偺棫偪忋偑傝偱僞僀儅傪僀僯僔儍儔僀僘偡傞丅
丂僨僁乕僥傿乕斾偼僾儕僙僢僒傛傝僨乕僞偲偟偰梌偊傞丅僞僀儅偼儚儞僔儑僢僩丒僷儖僗敪惗儌乕僪偲偟偰僀僯僔儍儔僀僘偝偣傞偨傃偵僨乕僞偺抣仏僞僀儅丒僋儘僢僋帪娫偩偗弌椡傪"1"偲偡傞丅
| 儌乕僞乕宆斣 | RE025-055-34EBA200A |
| 僩儖僋掕悢 | 16.30[mNm/A] |
| 抂巕娫掞峈 | 1.34[ ohm ] |
| 柍晧壸揹棳 | 53.90[ mA ] |
| 抂巕娫揹埑 | 7.2[ V ] |
| 僊傾宆斣 | GP026A037-0016B1A00A |
| 僊傾尭懍斾 | 16.00:1 |
| 僊傾岠棪 | 76[ 亾 ] |
| 廃埻壏搙 | 25.0[ 亷 ] |
| 弌椡僩儖僋 | 夞揮悢 | 揹棳 | 擖椡 | 弌椡 | 岠棪 |
| [Nm] | [rpm] | [mA] | [W] | [W] | [%] |
| 0.00 | 261 | 53.90 | 0.39 | 0.00 | 0.0 |
| 0.10 | 236 | 558.42 | 4.02 | 2.47 | 61.5 |
| 0.20 | 212 | 1062.94 | 7.65 | 4.43 | 5709 |
| 0.30 | 187 | 1567.46 | 11.29 | 5087 | 52.0 |
| 0.40 | 162 | 2071.98 | 14.92 | 6.78 | 45.5 |
| 0.50 | 137 | 2576.50 | 18.55 | 7.18 | 38.7 |
| 0.60 | 113 | 3081.02 | 22.18 | 7.07 | 31.9 |
| 0.80 | 63 | 4090.06 | 29.45 | 5.27 | 17.9 |
| 0.90 | 38 | 4594.59 | 33.08 | 3.60 | 10.9 |
| 1.00 | 13 | 5099.13 | 36.71 | 1.41 | 3.8 |
| 1.05 | -0 | 5373.13 | 38.69 | -0.00 | -0.0 |
| 丂 | 嵟戝楢懕揹棳帪 | 嵟戝弌椡帪 | 嵟戝岠棪帪 |
| 僩儖僋 | 0.34[Nm] | 0.53[Nm] | 0.10[Nm] |
| 夞揮悢 | 177[rpm] | 131[rpm] | 237[rpm] |
| 揹棳 | 1771[mA] | 2714[mA] | 538[mA] |
| 弌椡 | 6.30[W] | 7.20[W] | 2.38[W] |
| 岠棪 | 49.4[%] | 36.9[%] | 61.5[%] |