1.基本モジュール群
1-1.イニシャライズモジュール
1-2.セットアップモジュール
1-3.行動計画モジュール
1-4.MM I/F モジュール
1-5.タイマー割込みハンドラ
2.ロータリーエンコーダ系モジュール群
2-1.R・E計測データ作成モジュール
2-2.体位演算モジュール
3.超音波センサ系モジュール群
3-1.超音波センサ起動モジュール
3-2.超音波計測データ作成モジュール
4.赤外線センサ系モジュール群
4-1.赤外線センサ起動モジュール
4-2.赤外線センサ方向演算モジュール
5.タッチセンサ系モジュール群
5-1.タッチセンサ起動モジュール
5-2.タッチセンサ方向演算モジュール
6.駆動用モジュール群
6-1.PWM駆動モジュール
6-2.テストモジュール
6-3.ペナルティーモジュール
6-4.探索モジュール
6-5.予測移動モジュール
6-6.追跡モジュール
6-7.回避モジュール
|
|
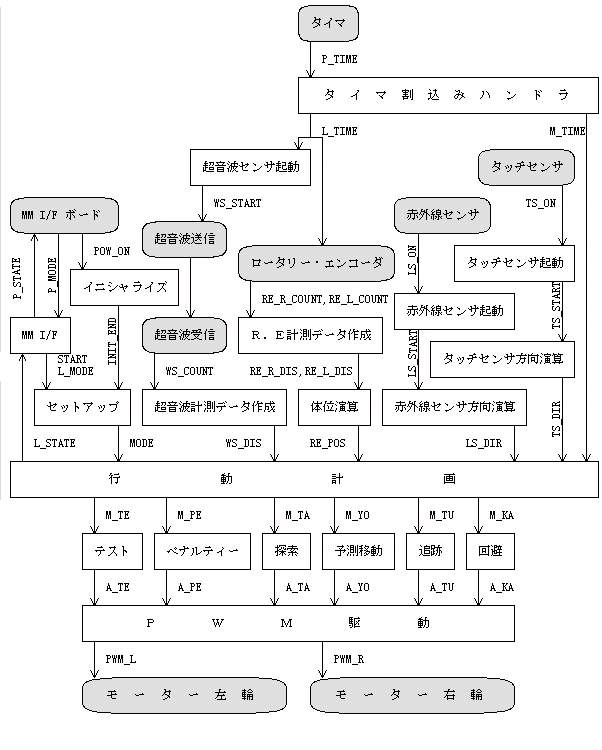
| 2-1.モジュール間信号図 |
| NO. | モジュール名 | モジュール名 |
| 1-1 | イニシャライズ | 68K,I/Oボードの初期化を行う。 |
| 1-2 | セットアップ | ディップスイッチにより、MIRSのセットアップを行い、スタートスイッチの入力を待つ。 |
| 1-3 | 行動計画 | モードの遷移を管理する。 |
| 1-4 | MM I/Fモジュール | LED点灯データなどを作成する。 |
| 1-5 | タイマー割込みハンドラ | タイマを止め再スタートし、タイマー割り込み関連モジュールを制御する。 |
| 2-1 | R・E計測データ作成 | ロータリエンコーダ計測データを作成する。 |
| 2-2 | 体位演算 | エンコーダ計測データ、超音波計測データをもとに、自己体位を演算する。 |
| 3-1 | 超音波センサ起動 | 超音波センサの、セレクトデータ及びトリガデータを制御する。 |
| 3-2 | 超音波計測データ作成 | 超音波センサ計測データを作成する。 |
| 4-1 | 赤外線センサ起動 | 赤外線センサの制御を行う |
| 4-2 | 赤外線センサ方向演算 | 光源の方向データを作成する |
| 5-1 | タッチセンサ起動 | タッチセンサの制御を行う |
| 5-2 | タッチセンサ方向演算 | タッチセンサの接触方向データを作成する |
| 6-1 | PWM駆動 | モーター駆動用のデータを作成する |
| 6-2 | テスト | テスト動作の移動情報を作成する。 |
| 6-3 | ペナルティー | ペナルティー動作の移動情報を作成する。 |
| 6-4 | 探索 | 探索動作の移動情報を作成する。 |
| 6-5 | 予測移動 | 予測移動動作の移動情報を作成する。 |
| 6-6 | 追跡 | 追跡動作の移動情報を作成する。 |
| 6-7 | 回避 | 回避動作の移動情報を作成する。 |
1-1.イニシャライズモジュール
| モジュール名 | イニシャライズモジュール | |||
| 使用言語 | C言語 | 製作担当 | 中道義之 | |
| Input | 電源ON信号 | |||
| Output | イニシャライズ終了信号 | |||
| 関係するモジュール | 関係するハードウェア | |||
| セットアップモジュール | <スタートスイッチ(プッシュボタン) パワーコントロールボード | |||
| 処理 | パワーコントロールボードで電源スイッチを押すことにより、電源ON信号の入力で、68K、I/Oボードの初期化を行なう。 初期化終了後、イニシャライズモジュールの終了信号としてイニシャライズ終了信号を出力する。 | |||
| 改訂記録 | ||||
1-2.セットアップモジュール
| モジュール名 | セットアップモジュール | ||
| 使用言語 | C言語 | 製作担当 | 中道義之 |
| Input | スタート信号 タイマ割込み制御信号 イニシャライズ終了信号 | ||
| Output | 初期モード信号 | ||
| 関係するモジュール | 関係するハードウェア | ||
| イニシャライズモジュール マンマシンI/Fモジュール 行動計画モジュール テストモジュール ペナルティモジュール | <マンマシンI/Oボード | ||
| 処理 | ディップスイッチに基づき、プログラムの初期化を行い、スタートスイッチの入力を待つ。 | ||
| 改訂記録 | |||
1-3.行動計画モジュール
| モジュール名 | 行動計画モジュール | ||
| 使用言語 | C言語 | 製作担当 | 中道義之 |
| Input | 初期モード信号 超音波センサ計測データ R・E位置データ 赤外線センサ方向信号 タッチセンサ方向信号 | ||
| Output | *モード選択信号 状態信号L | ||
| 関係するモジュール | 関係するハードウェア | ||
| MM I/F セットアップ 超音波計測データ作成 体位演算 赤外線センサ方向演算 タッチセンサ方向演算 タイマ割込みハンドラ テスト ペナルティー 探索 予測移動 追跡 回避 | <|||
| 処理 | |||
| 改訂記録 | |||
1-4.マンマシンI/Fモジュール
| モジュール名 | マンマシンI/Fモジュール | ||
| 使用言語 | C言語 | 製作担当 | 中道義之 |
| Input | 状態信号L 初期モード信号P | ||
| Output | 状態信号P スタート信号 | ||
| 関係するモジュール | 関係するハードウェア | ||
| セットアップモジュール 行動計画モジュール | MM I/F ボード | ||
| 処理 | 状態信号Lにより状態信号PをMM I/F ボードに送る。 | ||
| 改訂記録 | |||
1-5.タイマー割込みハンドラ
| モジュール名 | タイマー割り込みハンドラ | ||
| 使用言語 | C言語 | 製作担当 | 中道義之 |
| Input | タイマ割り込み信号 | ||
| Output | タイマ割り込み制御信号 | ||
| 関係するモジュール | 関係するハードウェア | ||
| 超音波センサ起動モジュール 行動計画 | タイマ | ||
| 処理 | タイマー割り込みより処理を超音波センサ起動か、R・E計測データ作成へ移す。 | ||
| 改訂記録 | |||
2-1.R・E計測データ作成モジュール
| モジュール名 | R・E計測データ作成モジュール | ||
| 使用言語 | C言語 | 製作担当 | 中道義之 |
| Input | R・E右カウントデータ R・E右カウントデータ | ||
| Output | R・E右距離データ R・E右距離データ | ||
| 関係するモジュール | 関係するハードウェア | ||
| 体位演算モジュール 行動計画 | ロータリーエンコーダ | ||
| 処理 | R・E右カウントデータ、R・E右カウントデータよりR・E右距離データR・E右距離データを体位演算モジュールに送る。 | ||
| 改訂記録 | |||
2-2.体位演算モジュール
| モジュール名 | 体位演算モジュール | ||
| 使用言語 | C言語 | 製作担当 | 中道義之 |
| Input | R・E右距離データ R・E左距離データ | ||
| Output | R・E位置データ | ||
| 関係するモジュール | 関係するハードウェア | ||
| R・E計測データ作成 行動計画 | |||
| 処理 | R・E右距離データ、R・E左距離デーよりR・E位置データを算出し行動計画に送る。 | ||
| 改訂記録 | |||
3-1.超音波計測データ作成モジュール
| モジュール名 | 超音波計測データ作成モジュール | ||
| 使用言語 | C言語 | 製作担当 | 中道義之 |
| Input | 超音波センサカウントデータ | ||
| Output | 超音波センサ計測データ | ||
| 関係するモジュール | 関係するハードウェア | ||
| 行動計画 | 超音波受信 | ||
| 処理 | 超音波センサカウントデータより超音波センサ計測データを算出し行動計画に送る。 | ||
| 改訂記録 | |||
3-2.超音波センサ起動モジュール
| モジュール名 | 超音波センサ起動モジュール | ||
| 使用言語 | C言語 | 製作担当 | 中道義之 |
| Input | タイマ割込み制御信号 | ||
| Output | 超音波センサ起動信号 | ||
| 関係するモジュール | 関係するハードウェア | ||
| タイマ割込みハンドラ | 超音波送信 | ||
| 処理 | タイマ割込みハンドラからのタイマ割込み制御信号により、超音波送信を動作させる。 | ||
| 改訂記録 | |||
4-1.赤外線センサ起動モジュール
| モジュール名 | 赤外線センサ起動モジュール | ||
| 使用言語 | C言語 | 製作担当 | 中道義之 |
| Input | 赤外線センサON信号 | ||
| Output | 赤外線センサ起動信号 | ||
| 関係するモジュール | 関係するハードウェア | ||
| 赤外線センサ方向演算 | 赤外線センサ | ||
| 処理 | 赤外線センサの反応を赤外線センサ方向演算に送る。 | ||
| 改訂記録 | |||
4-2.光源方向演算モジュール
| モジュール名 | 赤外線センサ方向演算モジュール | ||
| 使用言語 | C言語 | 製作担当 | 中道義之 |
| Input | 赤外線センサ起動信号 | ||
| Output | 赤外線センサ方向信号 | ||
| 関係するモジュール | 関係するハードウェア | ||
| 赤外線センサ起動 行動計画 | |||
| 処理 | 赤外線センサ起動より方向を算出しそれを行動計画に送る。 | ||
| 改訂記録 | |||
5-1.タッチセンサ起動モジュール
| モジュール名 | タッチセンサ起動モジュール | ||
| 使用言語 | C言語 | 製作担当 | 中道義之 |
| Input | タッチセンサON信号 | ||
| Output | タッチセンサ起動信号 | ||
| 関係するモジュール | 関係するハードウェア | ||
| タッチセンサ方向演算 | タッチセンサ | ||
| 処理 | タッチセンサの反応をタッチセンサ方向演算に送る | ||
| 改訂記録 | |||
5-2.タッチセンサ方向演算モジュール
| モジュール名 | タッチセンサ方向演算モジュール | ||
| 使用言語 | C言語 | 製作担当 | 中道義之 |
| Input | タッチセンサON信号 | ||
| Output | タッチセンサ方向信号 | ||
| 関係するモジュール | 関係するハードウェア | ||
| タッチセンサ起動 行動計画 | |||
| 処理 | タッチセンサの反応とその方向を行動計画モジュールに送る。 | ||
| 改訂記録 | |||
6-1.PWM駆動モジュール
| モジュール名 | PWM駆動モジュール | ||
| 使用言語 | C言語 | 製作担当 | 中道義之 |
| Input | 移動指令データ | ||
| Output | 右モーター速度データ 左モーター速度データ | ||
| 関係するモジュール | 関係するハードウェア | ||
| テスト ペナルティー 探索 予測移動 追跡 回避 | モーター右輪 モーター左輪 | ||
| 処理 | 行動指令によりPWM回路に速度データを送る。 | ||
| 改訂記録 | |||
6-2.テストモジュール
| モジュール名 | テストモジュール | ||
| 使用言語 | C言語 | 製作担当 | 中道義之 |
| Input | テストモード選択信号 | ||
| Output | テストモード移動指令データ | ||
| 関係するモジュール | 関係するハードウェア | ||
| 行動計画 PWM駆動 | |||
| 処理 | 行動計画モジュールの命令により、テストモードの動作をするようにPWM駆動モジュールに情報を送る。 | ||
| 改訂記録 | |||
6-3.ペナルティーモジュール
| モジュール名 | ペナルティーモジュール | ||
| 使用言語 | C言語 | 製作担当 | 中道義之 |
| Input | ペナルティーモード選択信号 | ||
| Output | ペナルティーモード移動指令データ | ||
| 関係するモジュール | 関係するハードウェア | ||
| 行動計画 PWM駆動 | |||
| 処理 | 行動計画モジュールの命令により、ペナルティーモードの動作をするようにPWM駆動モジュールに情報を送る。 | ||
| 改訂記録 | |||
6-4.探索モジュール
| モジュール名 | 探索モジュール | ||
| 使用言語 | C言語 | 製作担当 | 中道義之 |
| Input | 探索モード選択信号 | ||
| Output | 探索モード移動指令データ | ||
| 関係するモジュール | 関係するハードウェア | ||
| 行動計画 PWM駆動 | |||
| 処理 | 行動計画モジュールの命令により、探索モードの動作をするようにPWM駆動モジュールに情報を送る。 | ||
| 改訂記録 | |||
6-5.予測移動モジュール
| モジュール名 | 予測移動モジュール | ||
| 使用言語 | C言語 | 製作担当 | 中道義之 |
| Input | 予測移動モード選択信号 | ||
| Output | 予測移動モード移動指令データ | ||
| 関係するモジュール | 関係するハードウェア | ||
| 行動計画 PWM駆動 | |||
| 処理 | 行動計画モジュールの命令により、待ち伏せモードの動作をするようにPWM駆動モジュールに情報を送る。 | ||
| 改訂記録 | |||
6-6.追跡モジュール
| モジュール名 | 追跡モジュール | ||
| 使用言語 | C言語 | 製作担当 | 中道義之 |
| Input | 追跡モード選択信号 | ||
| Output | 追跡モード移動指令データ | ||
| 関係するモジュール | 関係するハードウェア | ||
| 行動計画 PWM駆動 |
|||
| 処理 | 行動計画モジュールの命令により、追跡モードの動作をするようにPWM駆動モジュールに情報を送る。 | ||
| 改訂記録 | |||
6-7.回避モジュール
| モジュール名 | 回避モジュール | ||
| 使用言語 | C言語 | 製作担当 | 中道義之 |
| Input | 回避モード選択信号 | ||
| Output | 回避モード移動指令データ | ||
| 関係するモジュール | 関係するハードウェア | ||
| 行動計画 PWM駆動 | |||
| 処理 | 行動計画モジュールの命令により、回避モードの動作をするようにPWM駆動モジュールに情報を送る。 | ||
| 改訂記録 | |||