2. 開発システムの概要
2.1 システムの目的
システムはMIRS競技において対戦相手システムに勝つことを目的とする。
2.2 開発システムの特徴
-
本システムは上記目的を達成するために次に示す特徴を有する。
-
・センサを用い、相手の動きを観測しながら、追尾するシステムである。
2.3 システムの外観
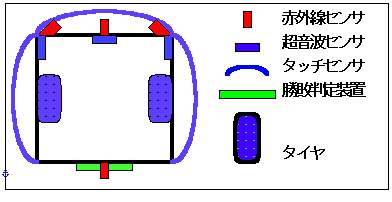 |
| Fig.1 |
2.4 システム遷移図
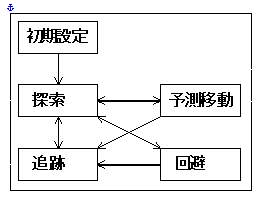 |
| Fig.2 |
2.5 システムモードの説明
2.5.1 探索モード
赤外線センサと超音波センサを使い、相手を探索する。赤外線センサが反応したら追跡モードに移る。タッチセンサに反応したらその方向に正面を向ける。超音波センサーに反応したらその方向に正面を向き、もう一度反応したら予測移動モードに移る。一定期間過ぎても各センサーに反応が無い場合回避モードに移る。
2.5.2 予測移動モード
探索モードでの超音波センサーの反応によって、予測移動1をする。予測移動のパターンは次のようなものがある。
・相手が停止。
・相手がこちらに向かって直進。
・相手が右から回りこむ。
・相手が左から回りこむ。
基本的にこの4つであるが、自分が競技場のどの位置にいるかによっても、予測移動は違ってくる。予測移動中に赤外線センサーが反応したら追跡モードに移る。センサーに反応の無いまま予測移動が終わった探索モードに移る。
2.5.3 追跡モード
赤外線センサーが反応した方向に正面を向け勝敗判定装置に向け直進する。勝敗判定装置が押せないうちに赤外線センサーが反応しなくなったら探索モードに移る。
2.5.4 回避モード
一番近い壁に向かい勝敗判定装置を壁に向けて、探索モードに移る。