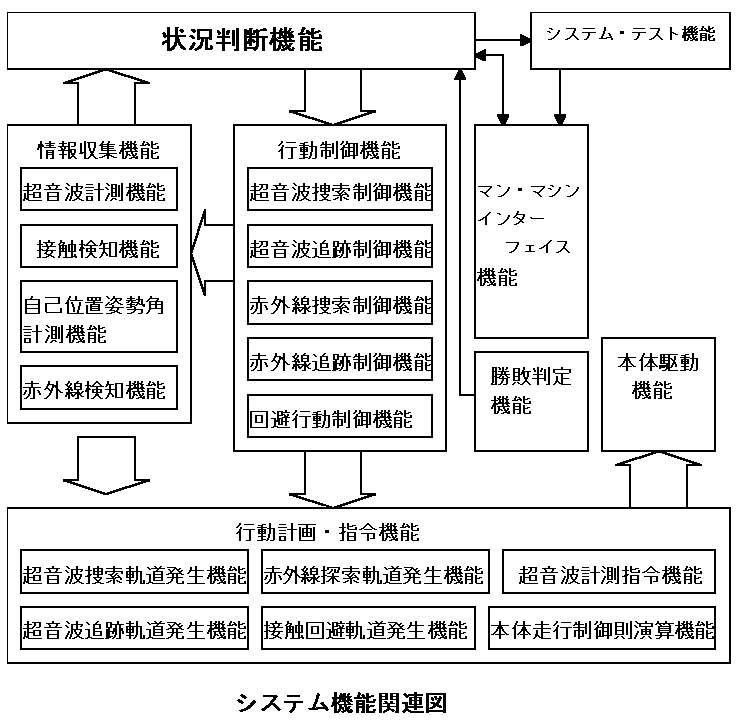
(1)情報収集機能
相手MIRSの位置および自己位置・姿勢のどに関する情報を計測・収集 して、状況判断および行動計画に必要なソフトウエア・データに変換する機能。超音波計測機能、赤外線検知機能、接触検知機能および自己位置・姿勢角計測機能からなる。
(2)状況判断機能
情報収集機能より与えられた情報に基づき状況判断を行い、適切な動作モードの選択を行なう。
(3)行動制御機能
情報収集機能より与えられた情報に基づき行動計画部および行動司令部を制御する。
(4)行動計画・指令機能
行動指令機能より与えられた制御命令に基づき行動計画を立て、駆動部への指令値を決定する。
(5)駆動機能
本体駆動モータ指令値に基づき、本体の移動・姿勢変更を行なう。
(6)その他の機能
勝敗判定機能、マン・マシン・インターフェイス機能およびシステム・テスト機能である。
(1)本体駆動サブシステム
センサー信号から演算された相手MIRSの位置またはあらかじめ与えられた走行パターン・データを目標値として、これに本体を追従させるための本体駆動系である。例えば、追跡モードでは、位置制御系を構成し、追い込みモードでは、速度フィードバック系を構成するなど、動作モードごとにソフトウエアによって種々の制御系の構成を切り替えることができる。
(2)超音波捜索・追跡サブシステム
本体正面に配置した3つの超音波センサーを用いて距離計測を行なう。これによってフェンスと相手MIRSとの識別および自己位置の確認を行ないつつ相手MIRSを捜索し、相手を追跡する。
(3)赤外線探索・追跡サブシステム
MIRS本体の正面に5つの超音波センサーを配置する。センサーを集中して配置することにより、相手の赤外線を発見した時にすぐに見失なわないようにする。