・本機の動きを、基本モードとサブモードに分けて以下のように定義する。
・基本モード
M0、システム初期化モード
M1、スタートモード
M2、追跡モード
M3、赤外線探索モード
M5、接触モード
M6、停止モード
M7、システムテストモード
・サブモード
S1、全失モード
S2、ペナルティー戦モード
<センサの優先順位>
1、タッチセンサ
2、赤外線センサ
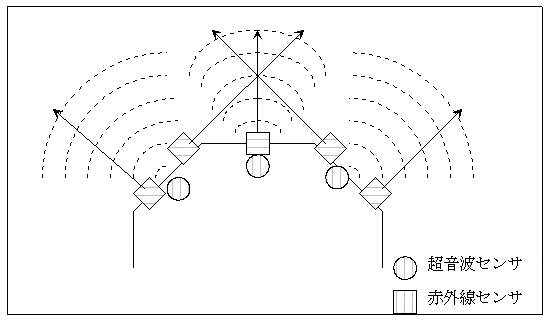
3、超音波センサ
センサの配置は下図のようになる。
各モードの詳細を以下に示す。
M0、システム初期化モード
(定義)全てを初期化して以前のデータをクリアする。
{初期化し終わったらスタート信号をだす。}
-----------------[m1-m0,スタート信号]------→M1,スタートモード
M1、スタートモード
(定義)スタートと同時に、左右中いずれかの超音波センサが反応するまで前進する。
{どれかの超音波センサが相手を捉える。}
-----------------[m2-m1]------------------→M2、追跡モード
{相手を見失う。}
-----------------[s1-m1]------------------→S1,全失モード
M2、追跡モード
(定義)相手を中心の超音波センサで捉えるようにしながら距離を詰めていく。しかし、相手とは接触しない。
{相手との距離が迫る。}
-----------------[m3-m2]------------------→M3、探索モード
{相手の赤外線を捉える。}
-----------------[m4-m2]------------------→M4、追込モード
{全て見失う。}
-----------------[s1-m2]------------------→S1、全失モード
M3、探索モード
(定義)相手とぶつからない程度に接近し、その距離を保ちながら赤外線を伺う。
{相手の赤外線を捉える。}
-----------------[m4-m3]------------------→M4、追い込みモード
{全て見失う。}
-----------------[s1-m3]------------------→S1、全失モード
{相手と接触する。}
-----------------[m5①-m3]----------------→M5①、相手接触モード
M4,追込みモード
(定義)赤外線を中心の赤外線センサで捉えるようにしながら距離を詰めて、勝敗判定装置を押す。
{相手との距離が離れる。}
-----------------[m2-m4]-----------------→M2、追跡モード
{相手の赤外線を見失う。}
-----------------[m3-m4]-----------------→M3、探索モード
{更に超音波も見失う。}
-----------------[s1-m4]-----------------→S1,全失モード
{相手と接触する。}
-----------------[m5-m4]-----------------→M5①,相手接触モード
M5、接触モード
(定義)相手と接触し、タッチセンサが反応した場合このモードに移る。さらにこのモードは次の二つに分かれる。
・タッチセンサを次の図の様に2段に構える。
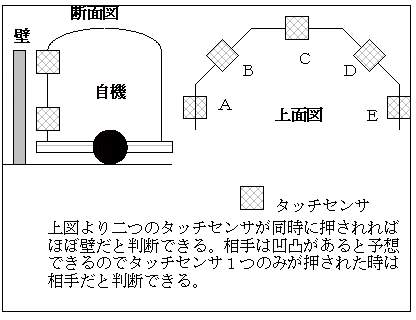
①1つだけが押されたら敵と判断して敵接触モードになる。この場合の動きは、図のCのスイッチが常に相手の正面を向くように動く。そして距離をとり相手の出方を待つ。
{超音波センサが反応}
-----------------[m3-m5①]---------------→M3,探索モード
②2つが同時に押されたら壁と判断し、壁接触モードになる。この場合の動きは、自機の後ろ(勝敗判定装置)を壁に向けるように回転し首を振り相手の発見に勤める。
{長い距離で超音波センサが反応
-----------------[m2-m5②]---------------→M2,追跡モード
{超音波センサが反応}
-----------------[m3-m5②]---------------→M3,探索モード
・サブモード
S1,全失モード
(定義)t秒間どのセンサにも反応が無い場合にこのモードになる。動きとしては、各センサを働かせながら壁に向かって前進し壁に接触し壁回避モードに移る。この間にどこかのセンサに反応があればそれに応じたモードに移る。
{相手の赤外線を捉える。}
-----------------[m4-s1]-----------------→M4、追い込みモード
{どれかの超音波センサが相手を捉えたる。}
-----------------[m2-s1]----------------→M2、追跡モード
S2,ペナルティー戦モード
(定義)後々・・・・