CN3ピンアサイン
3-4-2PWM回路
3-4-3赤外線センサ回路
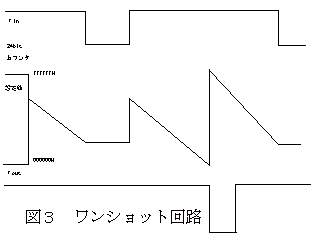
PIT内蔵のタイマは、設定によりいろいろ選べるが、この回路ではオーバーフローを検出できるDevice.Watchdog」と言うタイマを選んだ。図.4にこのタイマの動作を示す。
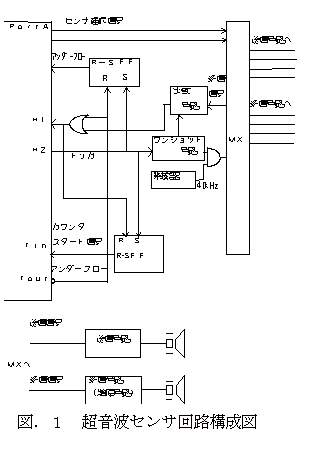
また、回りこみ波の除去については送信してから、一定時間基準電圧のレベルを上げる事で対処する。この時間はタイミングパルスによって決められる。
このため、障害物からの距離に関係なく、同じタイミングで受信が起きる事になる。回り込み波を受信する時間さえわかっているなら、その間だけ基準電圧を5Vに引き上げれば、回り込み波による影響をコンパレータによって、打ち消す事が出来る。この基準電圧発生部は、コンデンサの放電を利用して、タイミングパルスから基準電圧を作り出す部分である。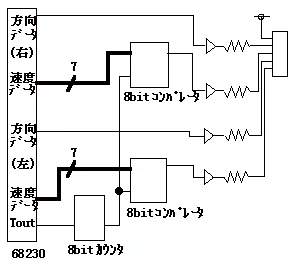
マルチプレクサは、コネクタを通じて4つの送受信回路と直結しており、PITから送られてくるセンサ選択信号により、使用する1対のセンサを選択する。
センサにはそれぞれ0から3まで番号がつけられていて、センサ選択信号もそれに対応して00から11迄の2ビットの信号より成り立っている。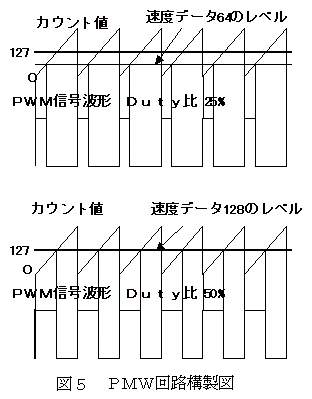
PWM信号発生回路は、カウンタより得られた8bitのカウント値と7bitの速度データとの比較によりPWM信号を形成している。PWM信号波形形成原理図を図.6に示す。図.6からもわかる様に今回設計製作した基板は、Duty比が0%~50%までのPWM波形を出力するようにしたものである。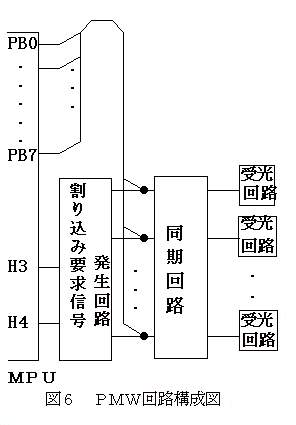
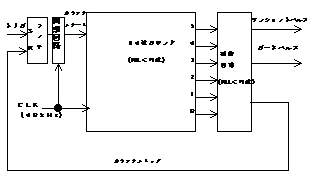
I/OSUBボードに搭載されているこの信号処理部は主に周辺回路からの赤外線信号の同期をとる信号同期部と68230に割込み要求をする割込み信号発生部からなる。信号同期部は74LS574が3個割込み発生部は74LS688,74LS00各1個ずつで構成する。
20[mm]×6[mm]
25[mm]×6[mm]
19[mm]×6[mm]
20[mm]×6[mm]
インターフェイス仕様
8入力D FF
/OCはGNDにおとしておく
8ビットデジタルコンパレータ
NAND×4
|(T)は、ITP用テストピンである。No. ピン名称 方向 信号 No. ピン名称 方向 信号 50 PA0 → 右PWM方向データ 25 PA0 → 超音波信号選択信号 49 PA1 → 右速度データ1ビット 24 PA1 → 超音波信号選択信号 48 PA2 → 右速度データ2ビット 23 PA2 → アンダフロー信号 47 PA3 → 右速度データ4ビット 22 PA3 → 未使用 46 PA4 → 右速度データ8ビット 21 PA4 → センサ選択信号(T 45 PA5 → 右速度データ16ビット 20 PA5 → センサ選択信号 44 PA6 → 右速度データ32ビット 19 PA6 → 未使用 43 PA7 → 右速度データ64ビット 18 PA7 → 未使用 42 PB0 → 左PWM方向データ 17 PB0 ← 赤外線信号 41 PB1 → 左速度データ1ビット 16 PB1 ← 赤外線信号 40 PB2 → 左速度データ2ビット 15 PB2 ← 赤外線信号 39 PB3 → 左速度データ4ビット 14 PB3 ← 赤外線信号 38 PB4 → 左速度データ8ビット 13 PB4 ← 赤外線信号 37 PB5 → 左速度データ16ビット 12 PB5 ← 赤外線信号 36 PB6 → 左速度データ32ビット 11 PB6 ← 赤外線信号 35 PB7 → 左速度データ64ビット 10 PB7 ← 赤外線信号 34 PC0 ← 右PWM方向データ(T) 9 GND 33 PC4 未使用 8 H1 超音波割込み要求信号 32 PC1 ← 左PWM方向データ(T) 7 GND 31 PC5 未使用 6 H2 超音波送信トリガ 30 PC 2/Tin 未使用 5 PC 2/Tin → 超音波カウンタスタート 29 PC5 未使用 4 H3 ← 割込み要求信号 28 PC 3/Tout → カウンタのCLK 3 PC 3/Tout ← アンダフロー信号 27 PC7 未使用 2 H4 → 割り込み認可信号 26 GND 1 GND
コネクタ:16ピンコネクタアングルタイプPS-16PLB-D4LT1-FL1(航空電子)
No. ピン名称 方向 信号 1 Vcc Vcc 2 S0(センサ0) → 送信信号 3 S1(センサ0 ← 受信信号 4 GND GND 5 Vcc Vcc 6 S0(センサ1) → 送信信号 7 S1(センサ1) ← 受信信号 8 GND GND 9 Vcc Vcc 10 S0(センサ2) → 送信信号 11 S0(センサ2) ← 受信信号 12 GND GND 13 Vcc Vcc 14 S0(センサ3) → 送信信号 15 S0(センサ3) ← 受信信号 16 GND GND
CN5ピンアサイン
No. ピン名称 方向 信号 1 Vcc Vcc 2 S0 → 右方向信号 3 S1 → 右PWM信号 4 S2 → 左方向信号 5 S3 → 左PWM信号
CN4ピンアサイン
No. ピン名称 方向 信号 1 l1 ← 赤外線信号 2 Vcc → 3 l2 ← 赤外線信号 4 GND → 5 l3 ← 赤外線信号 6 Vcc → 7 l4 ← 赤外線信号 8 GND → 9 l5 ← 赤外線信号 10 Vcc → 11 l6 ← 赤外線信号 12 GND → 13 l7 ← 赤外線信号 14 Vcc → 15 l8 ← 赤外線信号 16 GND →