11.ソフトウェア構成
我が班のMIRSは、”適応型”を前提として開発を進めている。よって他班の動作を調査しつつ、徐々に自機の動作を決定していく予定である。
まず、ソフトウェア上における制御のかたまりを”モジュール”と呼ぶことにする。
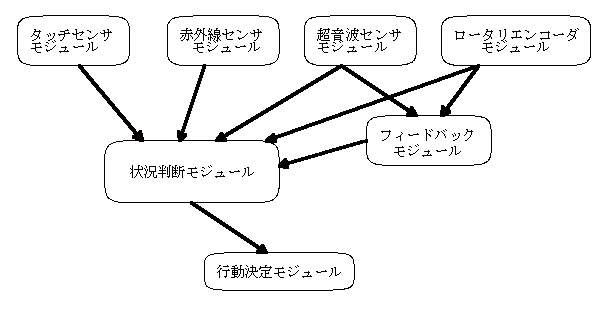
下に簡単なモジュールの遷移を示す。
<各モジュールの説明>
- ・タッチセンサモジュール
- タッチセンサにより、障害物の位置を判断し、情報を状況判断モジュールへわたす。
- ・赤外線センサモジュール
- 赤外線センサにより、相手の後方かを確認し、情報を状況判断モジュールへわたす。
- ・超音波センサモジュール
- 超音波センサにより、壁・相手の位置を読み取り、情報をフィードバックモジュール、状況判断モジュールへわたす。
- ・ロータリエンコーダモジュール
- ロータリエンコーダにより、自機の座標を絶えず確認し、情報をフィードバックモ
ジュール、状況判断モジュールへわたす。
- ・フィードバックモジュール
- 超音波センサ、ロータリエンコーダの情報より自機の座標のずれを修正する。
- ・状況判断モジュール
- 各モジュールからの情報を総合し、自機の現在おかれている状況を判断し、行動決定モジュールへ情報をわたす。
- ・行動決定モジュール
- 状況判断モジュールからの情報により、自機の行動を決定する最終的なモジュールである。