目的 本仕様書はMIRS競技規定に基づき95年度1班の作成する自立型小型知能ロボットの基本仕様を記述する。
1、システムの基本機能
システムには、次の3つの機能がある。 ・情報処理機能 ・情報収集機能 ・駆動機能 次に各機能の相互関係を図に示し、各機能について説明を加える。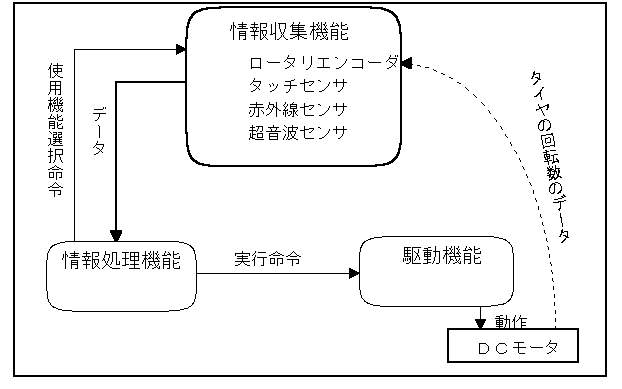
目的 本仕様書はMIRS競技規定に基づき95年度1班の作成する自立型小型知能ロボットの基本仕様を記述する。
1、システムの基本機能
システムには、次の3つの機能がある。 ・情報処理機能 ・情報収集機能 ・駆動機能 次に各機能の相互関係を図に示し、各機能について説明を加える。情報処理機能について
1)自機位置認識機能 ロータリエンコーダと超音波センサからのデータを処理して自機の現在位置を認識する。 2)相手機位置認識機能 超音波センサからのデータと自機位置のデータとを照らし合わせて相手機位置を認識する。 3)赤外線キャッチ機能 赤外線センサで赤外線をキャッチする。 4)駆動指示機能 情報収集機能からのデータに応じて自機を移動させるための命令を駆動機能に送る。 5)使用機能選択指示機能 どのセンサを実行するかを命令する。 6)モードマネージメント機能 自機位置、相手機位置、情報及び現在の動作モードを認識し次に行うべう動作モードを決定する。 参考資料 moon:/mirsdoc/mirs94 9401 kihon/kihon.sam