超音波センサの指向性を鋭くし、相手MIRSの位置を正確に捉える方法を探し出すこと。
超音波というのは、人間の可聴範囲以上(約16KHz)の音波をいう。我がMIRSにおいて、障害物の検知・距離測定と自機座標の確認をするセンサが超音波センサである。今回MIRSで使用する超音波センサは反射方式(独立型)を採用している。
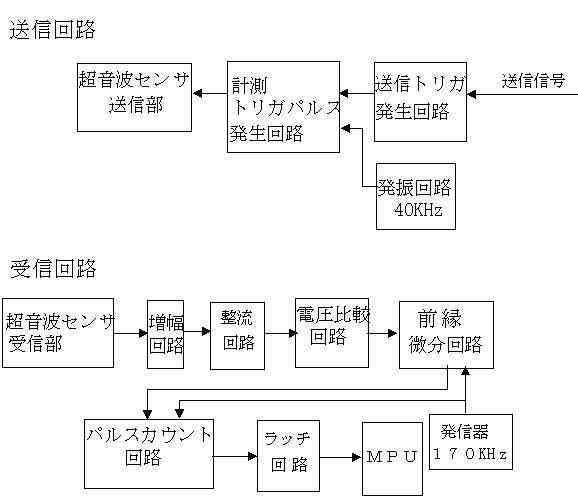
超音波は40KHzの周波数で発信される。超音波センサは送信信号によって制御され、超音波送信と同時にカウンターはカウントを始める。
物体に当たり反射した超音波を受信して測定を行う。カウントの打ち切りは、前縁微分回路からの受信信号を受けたときあるいは後で述べる時間以内に信号が入ってこなかったときである。測定方法はブロック図を参照のこと。
測定で注意しなければならないのは、超音波が直接送信機から回り込んでくることである。つまり、超音波を発信してからある時間は受信機が受け付けないようにしなければならない。
そこで、超音波を発信してから受信するまでの時間をt[s]、物体までの距離をr[m]、音速をc[m/s]として計算すると、
(式)t=2r÷c [s] (*)
where c=344[m/s]
また、このときのrの最小値を20cm、最大値は2mとすると、
(式)tmin=1.16[msec] 、tmax=11.6[msec]
となるので、測定は1.16[msec]から11.6[msec]までの間だけ測定すればよいことがわかる。
その他に、カウンタ回路によってタイミングパルス(出力周期20ms、パルス幅4ms)が発信されているが、そのときの受信信号が16ms以下という条件を満たしているのでこのことは考える必要がない。
また、距離を測る際に1パルスを1cmとして数えるためのクロックの周波数は先ほどの式(*)を用いて1m測定したとき誤差を1cm以内に収めるには、
(式)s=2r÷c
=2×1[mm]÷344[m/s]
=2.91[μs]
つまり、使用する周波数は170.20[KHz]となる。
|
|
超音波センサには電気信号を超音波に変えて空気中に発射する超音波スピーカ(送波器)部と、空気中を伝搬してきた超音波を受けてそれを電気信号に変える超音波マイクロホン(受波器)部とがある。この両者をあわせて超音波トランスジューサーという。
超音波トランスジューサーのように電気信号を機械的振動に変えたりその逆をする電気-振動変換素子は、原理的には一つの素子が送波器にも受波器にもはたらかせることが出来る。しかし送波と受波では空気の振動振幅が大幅に異なり、またインピーダンスを変えた方が効率がいいので実際はほとんど送波器、受波器で別個の素子を用いている。
超音波のような波が対象物に当たった場合、対象物が凹凸のある表面を持っていたとするならば、超音波は散乱しあらゆる方向に反射波が進んでいく。しかし鏡面を持っていたとすると入射角と反射角の関係から反射波は反射角の方向にしか観測されない。センサに対して斜めの鏡面は観測されにくいと思われる。超音波にとってどの程度までが散乱面なのかは波長λから知ることが出来る。以下にその関係式を示す。
(式)v=λf
ここで20℃の空気中の音の伝搬速度を求めると、
v=343.5
超音波の周波数を40KHzとして波長λを求める。
(式)λ=v÷f =343.5÷40k=8.6[mm]
以上の結果により、対象物の凹凸が約 8.6[mm] 以上の場合には散乱面とみなされる。
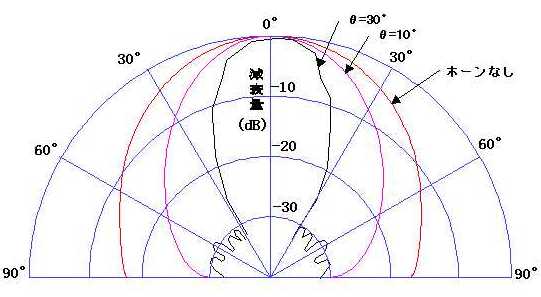
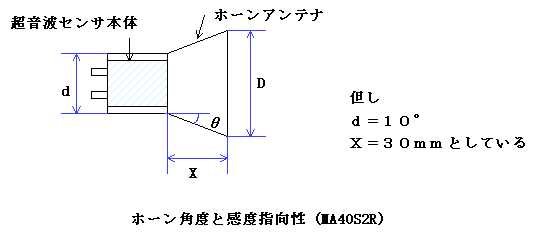
超音波は超音波スピーカからビーム状に広がる。指向性は、超音波放射面の寸法と周波数によって決まるが、指向性が緩いと計測された対象物体はぼやけて見える。この対策の一つとしては超音波センサの外部にホーンをとりつけることにより指向性を鋭くする方法がある。一般にホーン形状として、開口部が大きく全長が長いほど指向性が鋭くなる。以下に送信器の指向性の一例を示す。受信器の指向性もほぼ同じである。
|
|