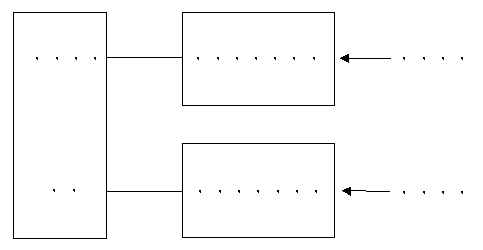
赤外線センサ信号回路と赤外線センサ信号処理回路で赤外線センサ回路は構成される。
この回路は、赤外線センサ信号回路内の受光素子から送られてくる信号(HorL)を処理し、信号の状態が変化したときに、割り込み要求信号をMPUに送る。また、そのときの各受光素子の状態はレジスタから読み込まれる。
|
|

|
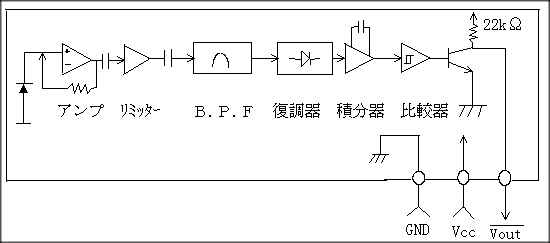
ところで、受光素子”SHARPIS1U60”は、送信機の発光とその他を区別するために、検出スレッショルドを自動的に上げる構造となっている。したがって、赤外線は38kHzの点灯パルスで発信される。そのためパルス電流をつくる回路が必要である。
・赤外線LED
| 項目 | 記号 | 定格 | 単位 |
| 直流順電流 | IF | 100 | mA |
| 直流電流低域率(Ta>25℃) | ΔI |
-1.33 | mA/℃ |
| パルス順電流 | IFP(注) | 1 | A |
| 直流逆電圧 | V |
5 | V |
| 許容損失 | PD | 150 | mW |
| 動作温度 | Topr | ー20~75 | ℃ |
| 保存温度 | Tstg | ー30~100 | ℃ |
| 項目 | 記号 | 測定条件 | 最小 | 標準 | 最大 | 単位 |
| 順電圧 | VF | IF=100mA | - | 1.35 | 1.5 | V |
| 逆電流 | IR | VR=5V | - | - | 10 | A |
| 放射強度 | IE | IF=50mA | 12 | 20 | - | mW/sr |
| 光出力 | PO | IF=50mA | - | 11 | - | mW |
| 端子間容量 | CT | VR=0,f=1MHz | - | 20 | - | pF |
| ピーク間容量 | λP | IF=50mA | - | 950 | - | nm |
| スペクトル半値幅 | Δλ | IF=50mA | - | 50 | - | nm |
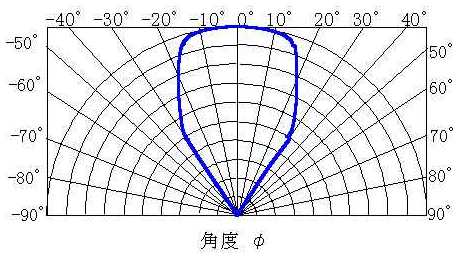
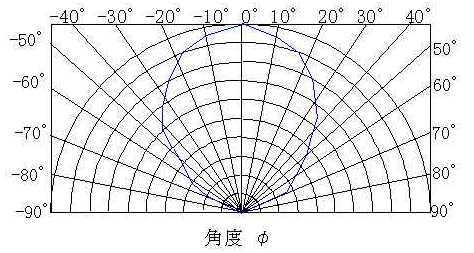
| 半値角 | θ1/2 | IF=50mA | - | ±23.5 | - | ° |
<X方向特性>
|
 |
| 項目 | 記号 | 定格値 | 単位 |
| 電源電圧 | Vcc | 0~6.0 | V |
| 動作温度 | Topr | -10~+60 ※1 | ℃ |
| 保存温度 | Tstg | -20~+70 | ℃ |
| 半田温度 | Tsol | 260 | ℃ |
※1)結露なきこと。
| 項目 | 記号 | 動作条件 | 単位 |
| 電源電圧 | Vcc | 4.7~5.3 | V |
| 項目 | 記号 | MIN | TYP | MAX | 単位 | 備考 |
| 消費電流 | Icc | - | 2.8 | 1 .5 | mA | 入力光なし、出力端子OPEN | ハイレベル出力電圧 | VOH | Vcc-0.2 | - | - | V | ※2,出力端子OPEN |
| ローレベル出力電圧 | VOL | - | 0.45 | 0.6 | V | ※2,ÌßÙ±¯Ìß抵抗2.2KΩ |
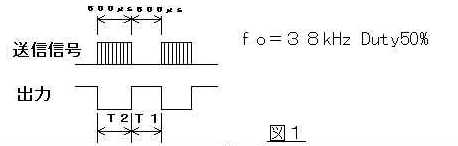
| ハイレベルパルス幅 | T1 | 400 | - | 800 | μs | ※2 |
| ローレベルパルス幅 | T2 | 400 | - | 800 | μs | ※2 |
| B.P.F中心周波数 | fo | - | 38 | - | kHz | ※2 |
※2)図1に示すバースト波を、送信機にて送信するものとする。
|
受信距離 L = 0.2~5m,Ee<10 lx(※3),X方向Φ=0°の時、出力信号が(4)項の電気的特性を満足すること。
※3)受光面照度を示す。
※4)X方向:水平方向、Y方向:垂直方向とする。
受信距離 L = 0.2~3m、Ee<10 lx、X方向Φ≦30°
Y方向θ=0°の時(4)項の電気的特性を満足すること。
受信距離 L = 0.2~3m、Ee<10 lx、X方向Φ=0°
Y方向θ≦15°の時(4)項の電気的特性を満足すること。
<X方向特性>
|
赤外線センサがどの範囲で赤外線をとらえるかは、赤外線の放射強度によるので一概には言えないが、MIRS競技場の広さを考えれば、距離に関しては問題にならないと言える。
指向角特性については、前に述べたとおり、ある程度広い。場合によっては、ホーンなどにより指向角特性を狭める必要がある。(ただし、現時点では不必要だと考える)
下に、本MIRSにおける赤外線受光範囲のイメージ図を示す。
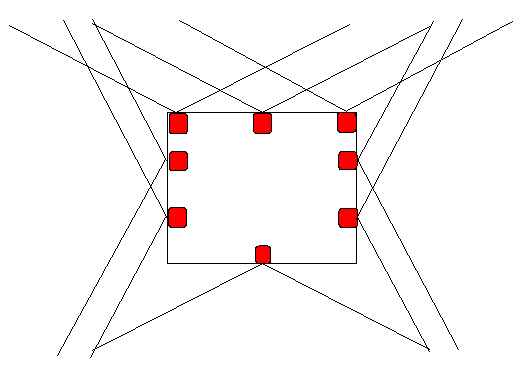
|
赤外線受光範囲は、受光素子の指向角・受光素子の取り付け位置・角度によって変化する。赤外線は相手MIRSの勝敗判定装置の位置を知る唯一の情報であり、本MIRSの要求を実現するため、今後実験・調査検討を行って赤外線受光範囲を設定する必要がある。