|
 |  |
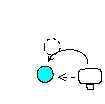
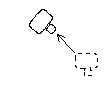
2丂憡庤婡偲帺婡偲偺嫍棧偑嬤偄応崌乮恾俁乯偼丄捛愓儌乕僪侾偵堏傞丅
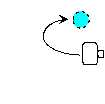
侾丏憡庤婡偲帺婡偲偺嫍棧偑墦偄応崌偼憑嶕儌乕僪傪懕偗傞丅
 |
 |  |  |
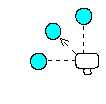
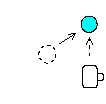
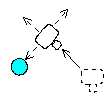
2丂憡庤婡偲帺婡偲偺嫍棧偑嬤偄応崌乮恾俆乯偼丄乮恾俇乯偺傛偆偵慁夞偟偰偐傜乮恾俈乯偺傛偆偵摦嶌偡傞丅
 |
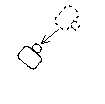
2丂憡庤婡偲帺婡偲偺嫍棧偑嬤偄応崌乮恾俉乯偼丄捛愓儌乕僪俁偵堏傞丅
 |
 |  |
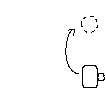
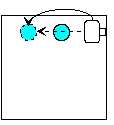
2丂憡庤婡偲帺婡偲偺嫍棧偑嬤偄応崌乮恾侾侽乯偼丄嫞媄応撪懁偵攚傪岦偗丄偦偺屻乮恾侾侾乯偺傛偆偵慁夞偟偰捛愓儌乕僪俀偵堏傞丅
 |
2丂愒奜慄僙儞僒乕偑憡庤婡偐傜奜傟偨応崌偼丄捛愓儌乕僪俀偵堏傞丅
1丂愙怗帪夞旔儌乕僪侾偵堏傞丅
1丂愙怗帪夞旔儌乕僪俀偵堏傞丅
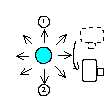 |  |  |  |  |
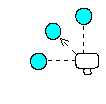
2丂傑傞侾偺傛偆偵憡庤婡偑堏摦偟偰偄傞応崌偼丄侾偱帺婡偑慁夞偟廔傢偭偨帪丄僙儞僒乕偵偼堷偭妡偐傜側偄偺偱乮恾侾係乯偺傛偆偵慁夞偡傞丅
傑傞俀偺傛偆偵憡庤婡偑堏摦偟偰偄傞応崌偼丄僶僢僋偟偰偄傞偲偒偵傕墶偺挻壒攇僙儞僒乕偱憡庤婡傪曔傜偊偰偄傞偺偱丄俋侽搙慁夞偡傞慜偵乮恾侾俆乯偺傛偆偵慁夞偡傞丅
傑傞俁偺傛偆偵憡庤婡偑堏摦偟偰偄傞応崌乮恾侾俇乯偼丄侾偱帺婡偑慁夞偟廔傢偭偨帪墶偺僙儞僒乕偱憡庤婡傪曔傜偊傞偺偱丄乮恾侾俈乯偺傛偆偵慁夞偡傞丅
3丂偦傟偧傟偺摦嶌傪偟廔傢偭偨傜丄捛愓儌乕僪俀偵堏傞丅
 |  |  |  |
2丂慜恑偟偨屻丄傑偨偼偟偰偄傞帪偵憡庤婡偑愒奜慄僙儞僒乕偱尒幐偭偨応崌偼丄偦偺傑傑慜恑偟偰挻壒攇僙儞僒乕偵堷偭妡偐傞傑偱慜恑偡傞丅
3丂慜恑偟懕偗丄挻壒攇僙儞僒乕偱憡庤婡傪敪尒偱偒偢丄憑嶕儌乕僪婳摴忋偵忔偭偨傜憑嶕儌乕僪偵堏傞丅傑偨丄慜恑偟偰偄傞搑拞偱憡庤婡傪挻壒攇僙儞僒乕偱敪尒偟偨応崌乮恾俀侽乯偼丄乮恾俀侾乯偺傛偆偵偦偺曽岦傊慁夞偟偰慜恑偡傞丅
4丂挻壒攇僙儞僒乕偱憑嶕儌乕僪婳摴忋偵偔傞傑偱偵憡庤婡傪敪尒偱偒偰傕丄愒奜慄僙儞僒乕偱敪尒偱偒側偄応崌偼丄挻壒攇僙儞僒乕偱扵偟偰婳摴廋惓偡傞摦嶌傪孞傝曉偟丄愒奜慄僙儞僒乕偱敪尒偱偒側偄帪娫偑堦掕帪娫傪夁偓偨傜丄夁偓偨帪揰偱岦偄偰偄傞曽岦傪偦偺傑傑慜恑偟憑嶕儌乕僪偺婳摴忋傑偱峴偒丄憑嶕儌乕僪偵堏傞丅偙偺偲偒乮憑嶕儌乕僪偺婳摴忋偵栠偭偰偄傞帪乯偵丄挻壒攇僙儞僒乕偱憡庤婡傪敪尒偟偨応崌偼傑偨慜偵彂偄偰偁傞摦嶌偱捛愓偡傞丅
仏丏挻壒攇僙儞僒乕偱扵偟偰偄傞帪偵愒奜慄僙儞僒乕偱憡庤婡傪敪尒偟偨帪偼丄堦掕帪娫偺僞僀儅乕偼儕僙僢僩偝傟丄傑偨愒奜慄僙儞僒乕偱憡庤婡傪尒幐偭偨応崌偼僞僀儅乕傪僙僢僩偡傞丅
 |  |  |
俀愙嬤偟偰偔傞偺側傜乮恾俀俀乯偺傛偆偵慁夞偟丄偦偙偱偦偺応慁夞偟偰偐傜乮恾俀俁乯偺傛偆側摦嶌傪偡傞丅傑偨丄慜偺挻壒攇僙儞僒乕偐傜憡庤婡偑奜傟偨応崌偼丄乮恾俀係乯偺傛偆偵慁夞偡傞丅
俁偦偺屻捛愓儌乕僪俀偵堏傞丅
 |  |
俀丏偦偺屻憑嶕儌乕僪偵堏傞丅
 |  |
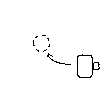
2丂偦偺屻丄憑嶕儌乕僪偵堏傞丅
1丂帪婡偺塃懁偺僞僢僠僙儞僒乕偑愙怗偟偨応崌偼嵍慁夞偟丄帪婡偺嵍懁偺僞僢僠僙儞僒乕偑愙怗偟偨応崌偼塃慁夞偡傞丅
2丂慁夞偟偨屻偼丄愙怗偡傞慜偵偟偰偄偨摦嶌傪懕偗傞丅