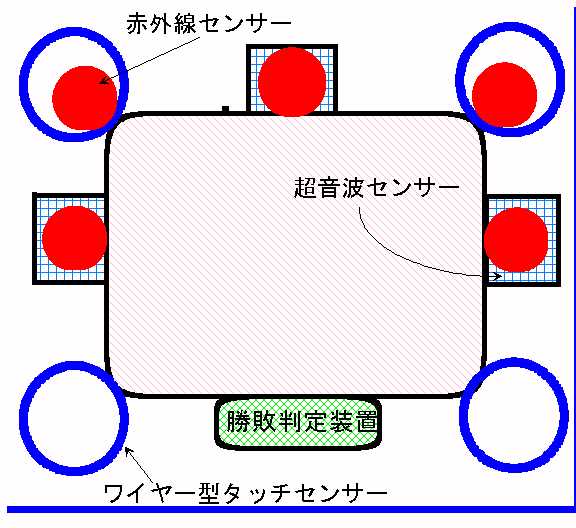
<赤外線センサー>
赤外線により、相手機の光源の存在の有無を確認するための装置。スリットを用いて赤外線の有効範囲をしぼるようにする。これにより、図に示すように近づくほど相手機の正確な位置を確認することができる。
<ワイヤー型タッチセンサー>
物体との接触時にスイッチが入り、自機が何等かの物体と接触したことを認識させるための装置。図のように取り付けるため、自機がどの方向に接触したのか正確な方向を認識することができる。例えば、前方の2つのセンサーが同時に接触した場合は前方に障害物が存在すると認識し、左斜め前方のセンサーだけが接触した場合は、左斜め前方に障害物が存在すると認識する。
<勝敗判定装置>
勝敗を判定するためのものであり、先に相手機のこれを押した側が勝者となり、押された側は敗者となる。