|
|
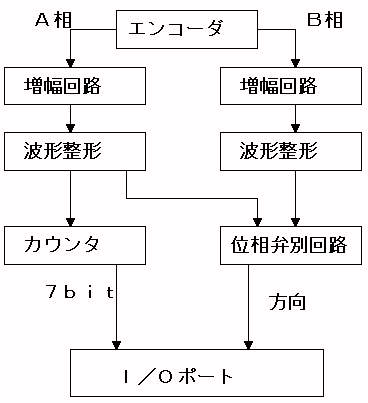
| Fig 5.1丂怣崋張棟 |
婛惢昳偵僐僱僋僞傪愙懕偟丄攇宍惍宍夞楬偵愙懕偱偒傞傛偆偵偟偨傕偺
夞揮幉偺夞揮懍搙偵斾椺偟偨廃攇悢傪帩偮俀庬椶偺媅帡倱倝値攇傪弌椡
儘乕僞儕乕僄儞僐乕僟偐傜偺攇宍傪曽宍僷儖僗偵惍宍偟僒乕儃儃乕僪偵憲傞
儘乕僞儕乕僄儞僐乕僟偵傛傞埵抲偲懍搙偺専弌
儌乕僞偑堦掕夞揮偡傞偨傃偵堦偮偺僷儖僗傪敪惗偡傞儘乕僞儕乕僄儞僐乕僟偼僀儞僋儕儊儞僞儖宆偲屇偽傟丄偙偺庬偺儘乕僞儕乕僄儞僐乕僟偼堦斒偵墌斦偵僗儕僢僩傪愗偭偰僼僅僩丒僀儞僞儔僾僞偵傛傝僗儕僢僩偺捠夁傪専弌偡傞傛偆偵側偭偰偄傞丅俋侽亱埵憡偺偢傟偨俀儠強偵僼僅僩丒僀儞僞儔僾僞傪攝抲偡傞偲丄擇屄偺僼僅僩丒僀儞僞儔僾僞偺埵憡娭學偐傜儌乕僞偺夞揮曽岦傪専弌偱偒傞丅
傑偨丄僼僅僩丒僀儞僞儔僾僞偱敪惗偟偨僷儖僗傪夞揮曽岦傪娷傔偰傾僢僾乛僟僂儞丒僇僂儞僞偱僇僂儞僩偡傟偽儌乕僞偺夞揮妏搙偺椵愊抣偡側傢偪尰嵼偺丄妏搙丄埵抲傪媮傔傞帠偑偱偒傞丅僇僂儞僩偟偨僷儖僗悢偼俈倐倝倲偺僷儔儗儖僨乕僞偵曄姺丅僇僂儞僞偼僨乕僞曐帩偺偨傔俢丒俥乛俥傪巊梡丅
攇宍惍宍夞楬偐傜偺弌椡偼俀庬椶偁傝埵憡偑俋侽搙偢傟偰偄傞丅夞揮曽岦偵傛偭偰偢傟偐偨偑堘偆丅
嘆丗俛偺棫偪忋偑傝帪偵俙偼俫側偺偱弌椡偼俫偲側傞
嘇丗俛偺棫偪忋偑傝帪偵俙偼俴側偺偱弌椡偼俫偲側傞

|
| Fig 5.2 |
俙丄俛偺廃攇悢偼夞揮悢偵斾椺偡傞偐傜俛偺僷儖僗傪堦掕帪娫枅偵僇僂儞僩偟夞揮悢傪僨乕僞壔偡傞丅僨乕僞偺撉傒崬傒偼僞僀儅乕妱傝崬傒傪巊偄丄偦偺偨傃偵僇僂儞僞偼儕僙僢僩偝傟傞
丂
丂丂丂丂巊梡揹尮丗俆倁亇俆亾丂丂係侽倣俙丂倧倰丂倢倕倱倱
丂丂丂丂弌椡攇宍丗嬤帡僒僀儞攇
丂丂丂丂弌椡怣崋丗俋侽並亇係俆並埵憡嵎2怣崋
丂丂丂丂墳摎廃攇悢丗侾侽倠俫倸
丂丂丂丂弌椡怣崋怳暆丗侾俆侽倣倁倫乕倫埲忋
丂丂丂丂弌椡怳暆曄摦棪丗係侽亾埲壓
丂丂丂丂岝尮丗俴俤俢乮俧俙俙俽乯
丂丂丂丂幉巒摦僩儖僋丗俆倗丒們倣埲壓
丂丂丂丂幉姷惈儌乕儊儞僩丗侽丏侾倗丒們倣俀
丂丂丂丂幉壸廳丗儔僕傾儖丗俀侽侽倗
丂丂丂丂丂丂丂丂僗儔僗僩丗俀侽侽倗
丂丂丂丂嵟崅夞揮悢丗俇侽侽侽倰倫倣
丂丂丂丂惓枴廳検丗俀俆倗埲壓
丂丂丂丂巊梡壏搙斖埻丗侽乕俆侽並俠
丂丂丂丂曐懚壏搙斖埻丗乕俀侽乕俉侽並