| 惢昳柤乮儊乕僇乕乯 | 俼俽亅俁俉侽俹俫 |
| 掕奿揹埑丂倕o | 俈丏俀乮倴乯 |
| 掕奿晧壸丂冄n | 侾侽侽乮倗倖丒們倣乯 |
| 掕奿揹棳丂倝n | 俀俋侽侽乮倣俙乯 |
| 掕奿夞揮悢丂冎n | 侾係俀侽侽乮倰倫倣乯 |
| 掕奿弌椡丂 | 侾係丏俇乮倵乯 |
| 徚旓揹椡 | 俀侽丏俋乮倵乯 |
| 岠棪乮掕奿帪乯 | 俈侽乮亾乯 |
| 柍晧壸夞揮悢冎max | 侾俇係侽侽乮倰倫倣乯 |
| 僩儖僋掕悢丂俲t | 俁係丏俆乮倗倖丒們倣乛俙乯 |
| 媡婲揹椡掕悢丂俲E | 侽丏侽侽侽係係乮倴乛倰倫倣乯 |
| 揹婡巕掞峈丂俼 | 侽丏俁俁乮兌乯 |
|
|
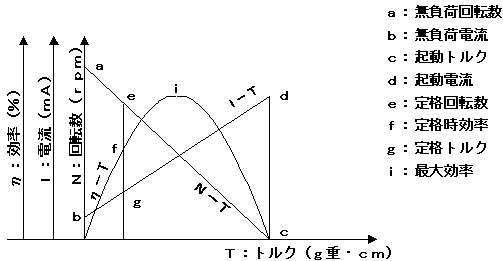
| Fig 7.1 捈棳儌乕僞偺摿惈 |
|
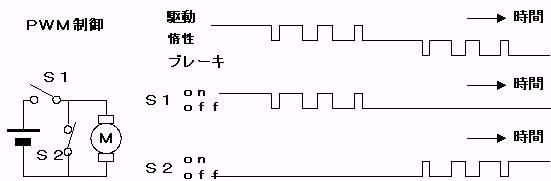
| Fig 7.2丂俢俠儌乕僞偺偟偔傒 |
捈棳儌乕僞偼丄嘆儌乕僞偺抂巕娫偵揹埑傪偐偗傞偲丄揹棳偑棳傟僩儖僋傪敪惗偟偰儌乕僞偺夞揮傪壛懍偟傑偡丅嘇儌乕僞偺抂巕娫傪抁棈偝偣傞偲丄儌乕僞偼敪揹婡偲側傝丄媡岦偒偺揹棳偑棳傟傞偨傔丄夞揮傪偲傔傛偆偲偡傞僩儖僋偑敪惗偟傑丅枖丄嘊儌乕僞偺抂巕娫傪奐曻偡傞偲丄揹棳偼棳傟側偄偺偱丄僩儖僋偼敪惗偣偢丄懩惈偱夞揮傪懕偗傑偡丅偙傟傪傾僫儘僌揑偵惂屼偟丄婓朷偡傞夞揮悢偱夞揮偝偣傞曽朄偺堦偮偵俹倂俵惂屼偑偁傝傑偡丅
俹倂俵惂屼偼丄捈棳儌乕僞傪傾僫儘僌揑偵惂屼偟丄婓朷偡傞夞揮悢偱夞揮偝偣傞偨傔偺堦偮偺曽朄偱偁傞丅偦偺曽朄偼丄師偺傛偆偱偁傞丅揔摉側僷儖僗楍傪敪惗丄偦偺僷儖僗偵傛傝僗僀僢僠儞僌傪峴偭偰丄儌乕僞偺抂巕偵揹埑傪報壛偟偨傝丄奐曻偟偨傝偡傞丅偙偺帪丄偦偺僷儖僗偺僨儏乕僥傿乕斾傪曄偊傞偙偲偵傛傝丄摍壙揑側傾僫儘僌惂屼傪峴偆丅
俵俬俼俽偺揹尮偲偟偰俶倝亅俠倓僶僢僥儕乕乮俈丏俀倁亅侾俈侽侽倣俙倛乯傪俀杮巊梡偡傞丅侾杮偼俆倁偵曄姺偟丄僙儞僒俬乛俥儃乕僪偲俇俉侽侽侽俬乛俷儃乕僪偵憲傜傟偰丄傕偆侾杮偼丄嬱摦梡偲偟偰壜媡僷儚乕曄姺儃乕僪偵憲傜傟傞丅儊僀儞僗僀僢僠偵傛傝俆倁揹尮偑擖傝丄僗僞乕僩僗僀僢僠偵傛傝嬱摦梡揹尮偑擖傞傛偆偵側偭偰偄傞丅
俵俬俼俽杮懱偺憤廳検丂 丂俵 乵倠倗乶
僞僀儎偺捈宎丂丂丂丂丂倓 乵倣乶
嵟崅懍搙丂丂丂丂丂丂丂倁倣倎倶 乵倣乛倱乶
嵟崅壛懍搙丂丂丂丂丂丂兛倣倎倶丂乵倣乛倱2乶偲偡傞偲
壛尭懍偵昁梫側椡丂 俥倣倎倶亖俵丒兛倣倎倶
壛尭懍偵昁梫側僩儖僋丂俿倣倎倶亖俥倣倎倶丒倓乛俀
僊傾斾倝偼丄
僩儖僋柺偱偼丂倝亞俿倣倎倶乛揔惈晧壸亖俙
懍搙柺偱偼丂倝亝掕奿夞揮悢丒兾丒倓乛嵟崅懍搙亖俛
亪俙亝倝亝俛丂偺娫偐傜僊傾斾倝傪慖傇丅
|
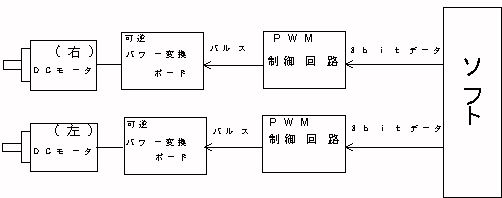
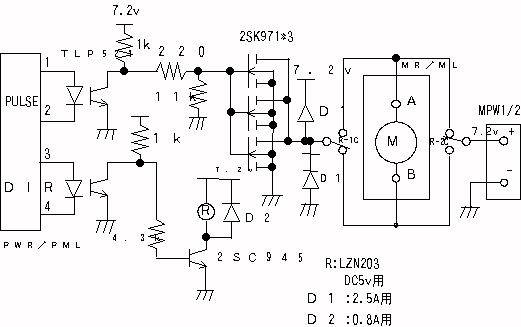
| Fig 7.3丂夞楬奣棯恾 |
|
| Fig 7.4丂懍搙僨乕僞偺愢柧 |
|
| Fig 7.5丂壜媡僷儚乕曄姺儃乕僪 |
儌乕僞偵揹棳偑棳傟傞偲丄堦帪揑偵揹椡偑媫忋徃偟丄偦傟偲摨帪偵僜僼僩晹偺揹椡偑媫崀壓偟丄巟忈偑弌傞丅偦偺偨傔揹尮傪暿乆偵偟側偗傟偽側傜側偄丅傑偨丄儌乕僞偵傛傞僲僀僘偑僜僼僩晹偵塭嬁傪媦傏偡偺偱丄僌儔儞僪傕暿乆偵偟側偗傟偽側傜側偄丅偟偨偑偭偰僜僼僩晹偲偺揹婥揑偮側偑傝傪堦愗抐偨側偗傟偽側傜側偄丅偦偙偱僼僅僩僩儔儞僕僗僞乕乮俿俴俹俆俀侾乯傪棙梡偟丄乮俀俽俲俋俈侾乯偵揹埑傪偐偗丄儌乕僞偺僗僀僢僠傪俷俶丆俷俥俥偟偨傝丄儕儗乕夞楬偵傛偭偰儌乕僞偵棳傟傞揹棳偺岦偒傪曄姺偝偣丄儌乕僞偺夞揮曽岦傪曄姺偡傞丅
嘆僋儘僢僋暘廃夞楬丒丒丒俵俹倀偐傜弌偰偄傞俉侽侽乵倠俫倸乶偺僋儘僢僋傪係暘廃偟偰俀侽侽乵倠俫倸乶偵偡傞丅
嘇僉儍儕傾怣崋惗惉夞楬丒丒丒嘆夞楬偐傜偔傞俀侽侽乵倠俫倸乶偺僋儘僢僋傪俀俆俇暘廃偟偰丄俈俉侽乵俫倸乶偺僉儍儕傾怣崋傪嶌傞丅
嘊僷儖僗惗惉夞楬乮塃乯丒丒丒僜僼僩晹偐傜憲傜傟偰偔傞俈倐倝倲偺懍搙僨乕僞傪俹倂俵怣崋偵曄姺偟偰偄傞丅
嘋僷儖僗惗惉夞楬乮嵍乯丒丒丒嘊夞楬偲摨偠嶌嬈傪偡傞丅
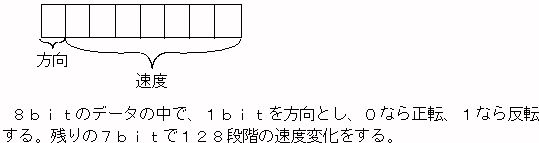
僜僼僩偐傜憲傜傟偰偔傞俉倐倝倲僨乕僞傪丄俹倂俵惂屼夞楬傪捠偡偙偲偵傛傝丄僷儖僗傪惗惉偡傞丅偙偺僷儖僗偵傛偭偰儌乕僞傪摦偐偡偙偲偵傛傝丄儌乕僞偼僷儖僗怣崋偑憲傜傟偰偄側偄娫傕懩惈偱夞揮偡傞偨傔丄徚旓揹椡傪愡栺偡傞偲偄偆棙揰偑偁傞丅