| モジュール名 | コマンド入力 | |||
| 使用言語 | C言語 | 製作担当 | 三尾 | |
| Input | ディップスイッチ入力信号 | |||
| Output | 決定モード | |||
| 関係するモジュール | ||||
| モード選択 | ||||
処理 | ディップスイッチの値を読み込みそれにあったモードを決定する。 | |||
| モジュール名 | 自己状態演算 | |||
| 使用言語 | C言語 | 製作担当 | 和田 | |
| Input | ||||
| Output | 自己位置、ロータリエンコーダカウント値 | |||
| 関係するモジュール | ||||
| 回避モード、赤外線モード、ノーマルモード | ||||
処理 | ロータリエンコーダの値を読み込み、自己位置の計算を行う | |||
| モジュール名 | 運動制御 | |||
| 使用言語 | C言語 | 製作担当 | 和田 | |
| Input | 行動命令 | |||
| Output | PWM信号 | |||
| 関係するモジュール | ||||
| ノーマルモード、赤外線モード、回避モード、超音波モード | ||||
処理 | 各モードから行動命令を受け取り、それに伴った動きをするようPWM信号を出す。 | |||
| モジュール名 | mmi表示 | |||
| 使用言語 | C言語 | 製作担当 | 三尾 | |
| Input | 現在位置、行動、モード | |||
| Output | mmi信号 | |||
| 関係するモジュール | ||||
処理 | MIRSの様子をLEDを通して知らせる。 | |||
| モジュール名 | 回避モード | |||
| 使用言語 | C言語 | 製作担当 | 和田 | |
| Input | 現在位置、タッチセンサ信号 | |||
| Output | 行動命令 | |||
| 関係するモジュール | ||||
| 自己状態演算、運動制御 | ||||
処理 | タッチセンサの反応と自己位置より回避行動をする。 | |||
| モジュール名 | イニシャライズモジュール | |||
| 使用言語 | C言語 | 製作担当 | 三尾 | |
| Input | ||||
| Output | ||||
| 関係するモジュール | ||||
| ポート入出力 | ||||
処理 | 各変数の初期化、MMIの設定 | |||
| モジュール名 | ポート入出力 | |||
| 使用言語 | C言語 | 製作担当 | 三尾 | |
| Input | レジスタの内容 | |||
| Output | 各信号 | |||
| 関係するモジュール | ||||
| 処理 | ポートの入出力 | |||
| モジュール名 | ノーマルモード | |||
| 使用言語 | C言語 | 製作担当 | 三尾 | |
| Input | 現在位置 | |||
| Output | 行動命令 | |||
| 関係するモジュール | ||||
| 自己状態演算、運動制御 | ||||
処理 | 現在位置を元に通常動作を行う | |||
| モジュール名 | 赤外線モード | |||
| 使用言語 | C言語 | 製作担当 | 和田 | |
| Input | 赤外線センサデータ | |||
| Output | 行動命令 | |||
| 関係するモジュール | ||||
| 運動制御 | ||||
処理 | 赤外線データを元に追跡動作を行う。 | |||
| モジュール名 | リセットモード | |||
| 使用言語 | C言語 | 製作担当 | 三尾 | |
| Input | ||||
| Output | ||||
| 関係するモジュール | ||||
| イニシャライズモジュール | ||||
処理 | 変数の初期化等。 | |||
| モジュール名 | モード選択 | |||
| 使用言語 | C言語 | 製作担当 | 和田 | |
| Input | 現在位置、タッチセンサデータ、赤外線センサデータ | |||
| Output | モード | |||
| 関係するモジュール | ||||
| ノーマルモード、赤外線モード、回避モード、自己状態演算 | ||||
処理 | 各データに基づいてモードの選択をする。 | |||
| モジュール名 | 超音波モード | |||
| 使用言語 | C言語 | 製作担当 | | |
| Input | 超音波センサデータ、現在位置 | |||
| Output | 行動命令 | |||
| 関係するモジュール | ||||
| 超音波測定、自己状態演算、運動制御 | ||||
処理 | 超音波センサのデータに基づいて探索行動をする。 | |||
| モジュール名 | 超音波測定 | |||
| 使用言語 | C言語 | 製作担当 | 三尾 | |
| Input | ||||
| Output | 超音波測定データ | |||
| 関係するモジュール | ||||
| 超音波モード、タイマ割り込みモード | ||||
処理 | タイマ割り込みにより起動され、定期的に超音波センサの値を読むと同時に超音波送信もする。 | |||
| モジュール名 | システム関係モジュール | |||
| 使用言語 | C言語 | 製作担当 | 三尾 | |
| Input | ||||
| Output | ||||
| 関係するモジュール | ||||
| イニシャライズモジュール | ||||
処理 | MIRS鋸王道開始、停止の動作を行う。 | |||
| モジュール名 | タイマ割り込みモジュール | |||
| 使用言語 | C言語 | 製作担当 | 三尾 | |
| Input | ||||
| Output | ||||
| 関係するモジュール | ||||
| 超音波測定、自己状態演算 | ||||
処理 | 一定間隔で呼び出され、必要な関数を起動する。 | |||
|
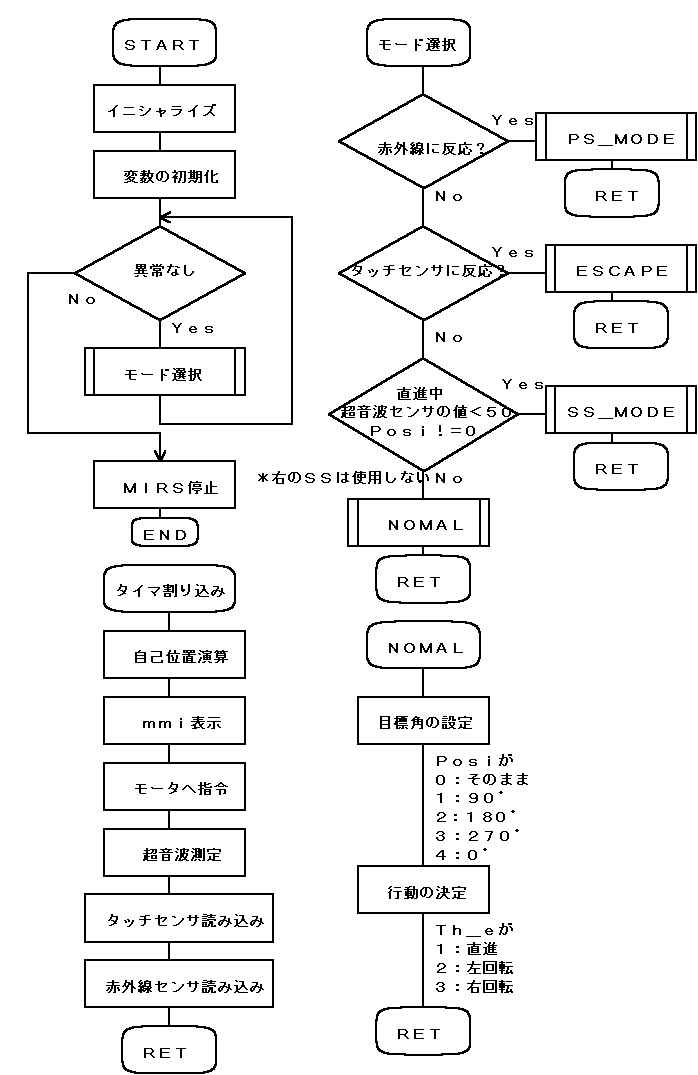
|
| Fig 2.1 フローチャート1 |
|
|
| Fig 2.2 フローチャート2 |