電源投入時またはリセットボタン挿下時に一回だけ起動され、処理終了後、行動計画モジュールを起動する。初期診断プログラムの実行、ハードウェアの初期設定,自己位置を競技開始位置に設定,モジュールの初期化を行う。またDIPスイッチの内容を読み込む。
ロータリエンコーダのカウント値を読み込み,自己位置(X,Y,Θ:姿勢角)を計算する。
3つの超音波センサにより順次距離を測定する。
赤外線センサが反応するとこのモジュールが起動される。赤外センサの状態を読み込む。
行動計画モジュールから起動される。起動時に軌跡と目的位置のデータが入る。目的位置に到達するまで0.5秒毎に再起動され、与えられた軌道に対する差を補正しながら自機を移動させる。目的位置に到達したときは行動計画モジュールを起動させる。実行中に実行を強制停止する機能を有する。
タッチセンサが反応するとこのモジュールが起動される。タッチセンサの状態を読み込む。
3つの超音波センサの測定したデータに基づき,時機の位置を確認し、自己位置確認モジュールのデータを補正する。
各モジュールのデータに基づき、9章に記載される動作を実現する.このモジュールにより走行制御モジュールが起動される。
|
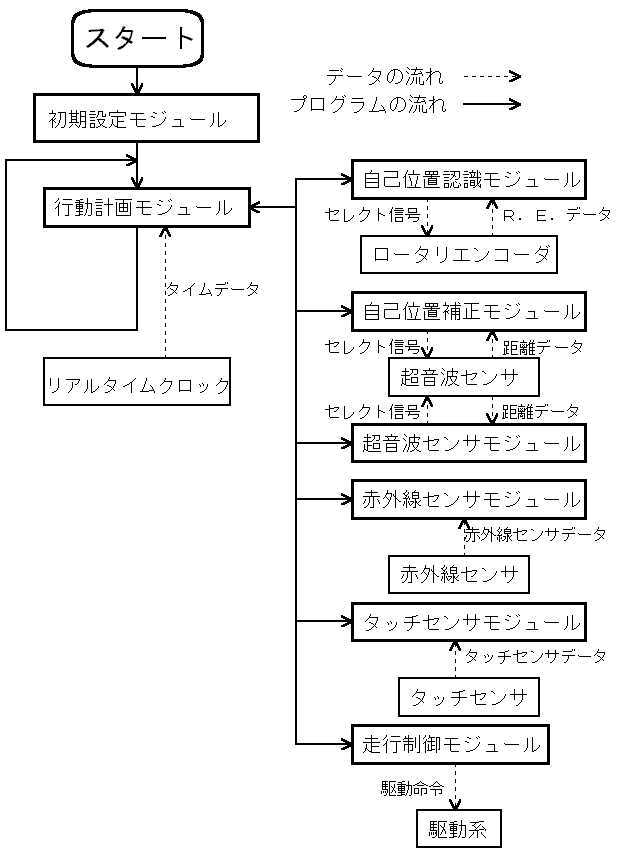
| Fig 11.1 モジュールの遷移 |