6 システム基本機能
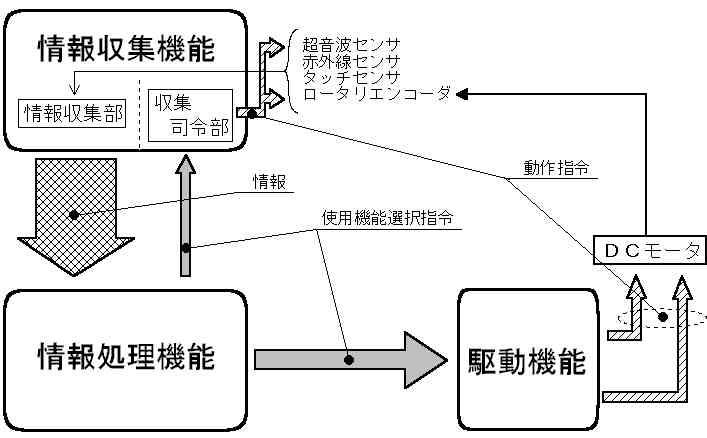
6.1 基本機能概略図
|
| Fig 6.2 基本機能概略図 |
6.2 基本機能説明
6.2.1 情報処理機能
- 自己位置認識機能
ロータリエンコーダ、(必要に応じて)超音波センサからの情報により自己位置を認識する。
- 相手位置認識機能
超音波センサ(タッチセンサ)からの情報と自己位置データを照らし合わせ相手位置を認識する。
- 駆動指示機能
各動作モードに応じて時機を移動させるための指令を駆動機能に送る。
- 行動指示機能
駆動以外の動作の指令(情報収集指令など)をすべて行う。
- モードマネージメント機能
自機位置、相手機位置、情報及び現在の動作モードを認識し次に行うべき動作モードを決定する。
6.2.2 情報収集機能
- 収集部
- 超音波センサ
自機から壁、もしくは相手MIRSまでの距離を計測する機能を有する。
- 赤外線センサ
相手MIRSの光源(LED)を見つけるという機能を有する。また、3つ使うことで正面もしくは左右どちらかの斜め前のどこに光源があるかおおよその見当がつくようになっている。
- タッチセンサ
自機の正面に障害物(相手MIRSもしくは壁)があるかないかを認識する機能を有する。
- ロータリーエンコーダ
これにより、タイヤの回転数と回転方向(正転、逆転)を計測、認識する機能を有する。
- 収集司令部
- 超音波センサに対して
超音波探索、追跡モードと自己位置補正モードそして初期動作モードと回り込みモードのときに超音波を出すようにする。
- ロータリーエンコーダに対して
各追跡モードで相手MIRSを見失ったとき、自己位置の補正をするとき、そしてタッチセンサで前方の障害物を確認したときなど必要に応じて、それまで保存したデータをメインへ送るようにする。
6.2.3 駆動機能
情報処理機能からの指令値を基に、モータを回転させる機能を有する。
前進・・・・・左右のモータを同じ速度で正転させる。
後退・・・・・左右のモータを同じ速度で逆転させる。
右回転・・・・同じ速度で左モータを正転、右モータを逆転させる。
左回転・・・・同じ速度で左モータを逆転、右モータを正転させる。
非常停止・・・左右のモータを停止させる。
MIRS本体の移動、回転速度は、モータの回転速度に比例する。