1.通常モード
-
(i) 初期モード
-
このモードは、スタートスイッチをおされた直後に入るモードである。この初期モードでは各変数のセットなどの初期設定をした後、MIRSの最初の行動である突撃(検討中)行動に入る。相手は必ず自分の真正面にいるので、開始と同時に猛スピードで相手の後ろに回りこみ後ろをつく。相手も動くのでこれで捕まるとは思わないが、その場に待機するMIRSや故障して動かないMIRSに対しては有効である。これで捕まらないとしても、その後の探索やすくなる。この時に使用する行動データは、リモコンモードによって実際に走らせたときに記録される最速のデータである。
-
(ii) 探索モード
-
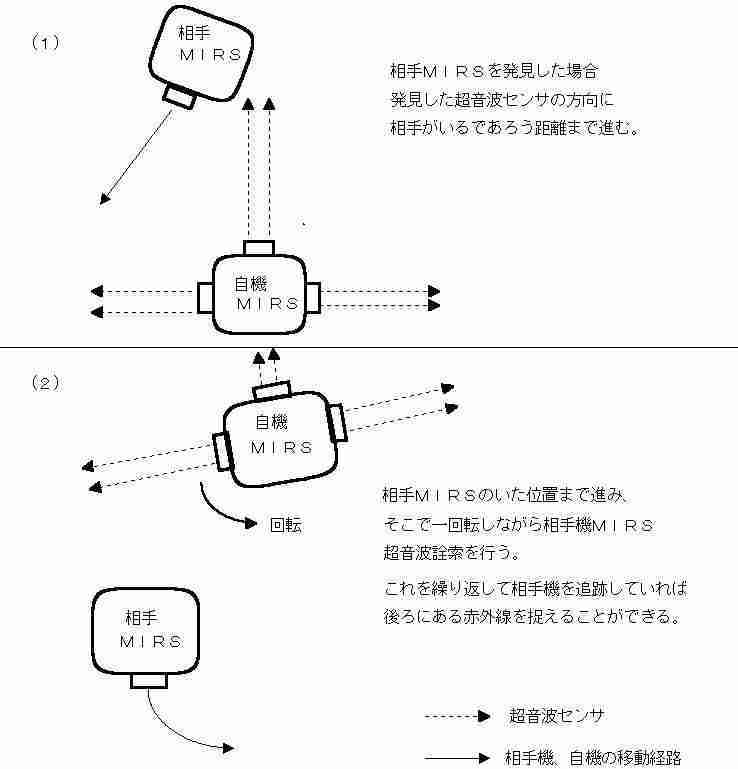
探索モードは、回転・待機等の動きを用い、超音波センサ・赤外線センサによって相手の位置をつかむモードである。超音波センサが左右・前方に付いているので、相手機を捉えやすい。自機からの距離をつかんだ後、相手の位置に自機を移動させ、相手機を追跡する。手順を以下に示す。
-
(iii)追跡モード
-
このモードは探索モードで相手が捕足された時に入るモードである。この追跡モードでは超音波センサ・赤外線センサを用いて追跡を行う。前方に3つの赤外線センサを設置してあるので、相手が逃げてもかなりの確率で追跡できる。但し、相手機がその場で回転した場合など見失ってしまう場合もあるから、そのときはまだ近くにいる可能性が高いのでその場で1回転し、それでも見つからなければ探索モードに戻る。赤外線センサを用いての追跡は以下のとおり行う。
<赤外線センサに反応があった場合>
1.3つ全て反応した場合
前方にいると判断し、前進する
2.正面、右が反応した場合
やや右寄りにいると判断し、右に寄りながら追跡する
3.右が反応した場合
右斜め前方にいると判断し、右に曲がりながら追跡する
4.正面、左が反応した場合
やや左寄りにいると判断し、左に寄りながら追跡する
5.左が反応した場合
左斜め前方にいると判断し、左に曲がりながら追跡する
6.正面のみ反応した場合
すぐ目の前にいると判断し、前進する
7.側面が反応した場合
反応した方向に90度回転し、追跡する
-
(iv)修正モード
-
このモードはロータリエンコーダによる自機座標の測定値と超音波センサによる測定値の間に誤差が生じてくるので、ある程度誤差が大きくなった場合にそれを補正するものである。誤差の修正は、競技開始から積算した走行距離が一定値を越えた場合と、急激な加速の後に行う場合がある。
-
(v)回避モード
-
回避モードは、MIRSに取り付けられたタッチセンサー、もしくはMIRS後面の赤外線センサーに反応があったとき、割り込みにより動作する。このモードは相手機や壁との衝突を防ぐためともう1つ相手機の追跡から逃れるためのものである。まず、障害物の回避はCPUが自機位置の座標を計算しながら動いているので起こることはないはずである。しかし、もしタッチセンサが触れてしまった場合は、相手か壁かを判断して回避する。壁の場合は壁と自機とある程度距離を取り、その場で回転して回避する。回転は、タッチセンサの左側が触れた時は右方向に、右側が触れた時は左方向に行なう。相手機の場合は相手との距離を取り、相手機の方向に向き直る。また、後ろに設置した赤外線センサが(自機の発信する)赤外線を捉えたときは、相手機が自機後ろにいる可能性が大きいので全速前進して逃げる。
-
(vi)停止モード
-
このモードは勝敗判定装置が押されたとき、割り込みにより動作する。このモードでは”LOSE”とLEDに点灯してモーターを停止する。
2 テストモード
3 ペナルティモード
4 リモコンモード