�P�A���Z���[�h�ł̓���
������̈ʒu�͒����g�Z���T�ɂ���Q���܂ł̋����ƃ��[�^���G���R�[�_�ɂ��F�����鎩�ȍ��W����Z�o����ǂ܂ł̋����Ƃ̔�r�ɂ��s�Ȃ��B����̈ʒu�͔F���������_�ł��̍��W���L�����Ă�����̂Ƃ���B����̔w��͑���̏��s���葕�u���甭����ԊO���ɔ�������ԊO���Z���T�Ƒ���̈ʒu���W�̕ω�����Z�o�����ړ������ɂ��F������B
�s���菇�@saerch (�T��)������̈ʒu�f�[�^�������ԊO���Z���T�f�[�^����
�@�P�ǂ̕����Ɍ���(turn)�@if�ǂɋ߂����R
�@�@�@�@���ǂ̕����Ɍ�����
�@�Q�ǂ̕����ɐi��(go)
�@�@�@�@���ǂ̋߂��Ɉʒu����
�@�R�ǂɂ������ĕ��s�ȕ����Ɍ���(turn)
�@�@�@�@���ǂɑ��Đ���
�@�S�i��(go)
�@�@�@�@�����ʂƕǂƂ̋������߂�
�@�T�ǂ̖��������Ɍ���(turn)
�@�@�@�@��if ��Q���ɐG�ꂽ(�^�b�`�Z���T�f�[�^���)
�@�@�@�@�S��180����](turn)���T
round�i��荞�݁j������̈ʒu�f�[�^�L�臛�ԊO���Z���T�f�[�^����
�@�@�@if�@����̈ʒu���ĔF���������P
�@�P����̕����Ɍ���(turn)�@if����̑���Ƃ̋�����50cm�ȓ����R
�@�@�@�@������̕����Ɍ�����
�@�Q����̂T�Ocm��O�܂Ői��(go)
�@�@�@�@������Ƃ̋�����50cm�ȓ�
�@�R����̕����ɑ��Đ����ȕ����Ɍ���(turn)
�@�@�@�@������̕����ɑ��Đ����ȕ���
�@�S����̈ʒu�𒆐S�ɉ�]�^��(�n�܂�̎������������Ɋi�[)(circlar motion)
�@�@�@�@�@if�@�~�^���̎n�܂�̎�������P�O�b�o�߁�saerch
�@�@�@�@�@if�@�ǂɂԂ��������T,180����](turn)���P
chase�@�i�ǐՁj���ԊO���Z���T�f�[�^�L��
if�@�Q�b�O�ȍ~�̑���ʒu�f�[�^�L�聨round
else�@��saerch
if�@����̔w�ʕ������ς�������P
�@�P����̕����Ɍ���(turn)
�@�Q�O�ɐi��(go)
���Z���[�h�ɂ����铮����܂Ƃ߂�D
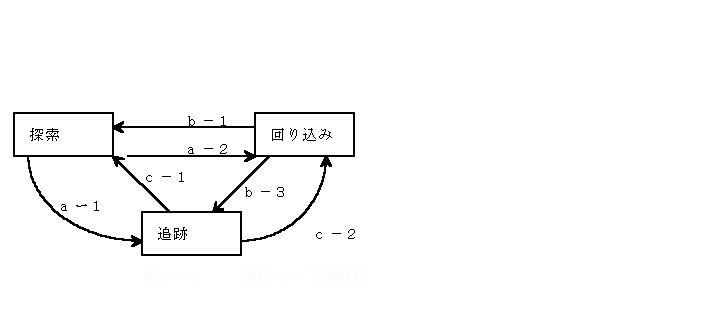
���[�h�J�ڏ���
| ���݂̏�ԁ��J�ڐ恫 | �T�����[�h | ��荞�� | �ǐ� | |
| �� | �� | �� | ||
| �T�� | �P | �� | ���[�h���쓮���Ă���P�O�b�o�� | �Q�b�ȏ㑊��̐ԊO����V���ɔF�����Ȃ�����̈ʒu���W��F�����Ă��Ȃ� |
| ��荞�� | �Q | �����F������ | �� | �Q�b�ȏ㑊��̐ԊO����V���ɔF�����Ȃ����V��������̈ʒu���W��F�����Ă��� |
| �ǐ� | �R | �ԊO����F������ | �ԊO����F������ | �� |
�ȉ��Ƀ��[�h�̑J�ڐ}������
�Q�A�y�i���e�B�탂�[�h