LEGO® MINDSTORMS™でつくるラジコンカー
専攻科 制御情報システム工学専攻 瀬川 博貴
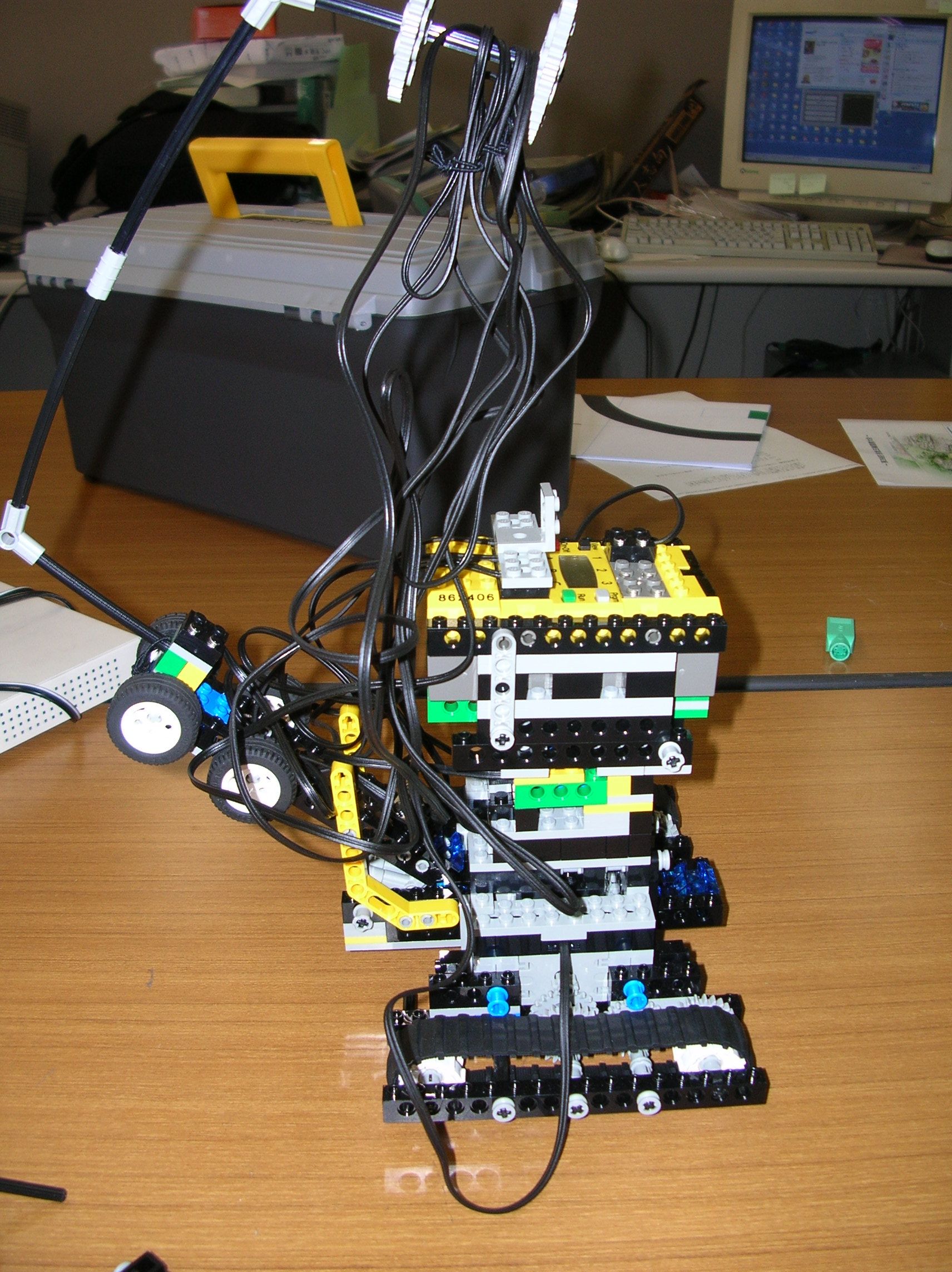
1.作成方法
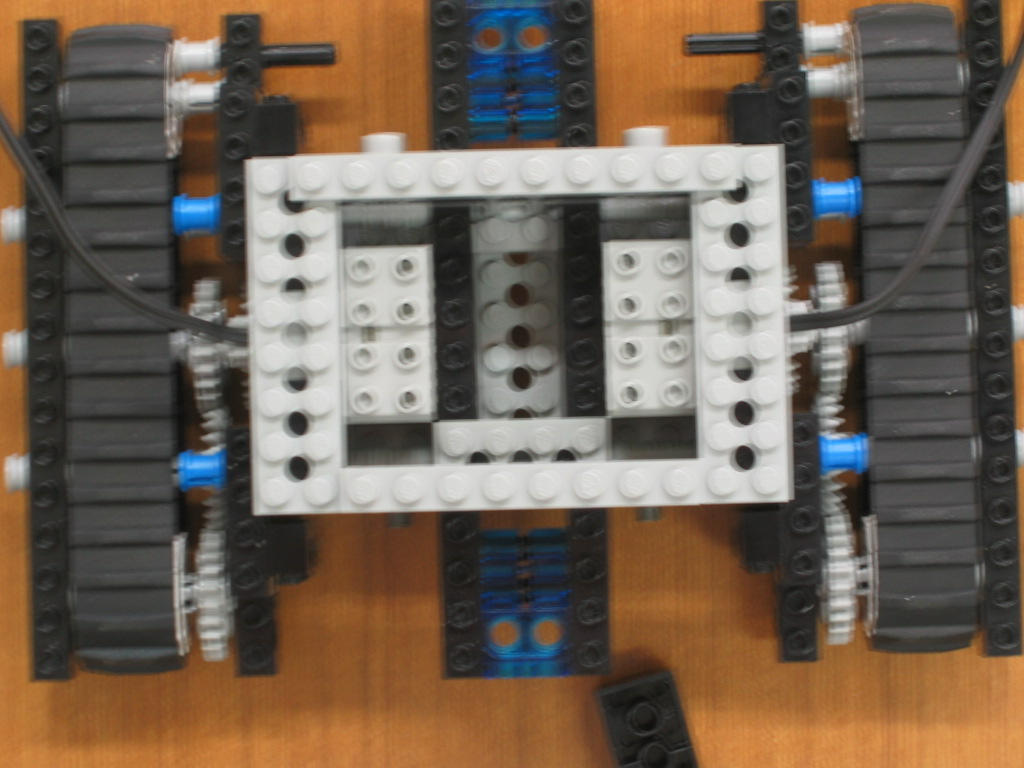
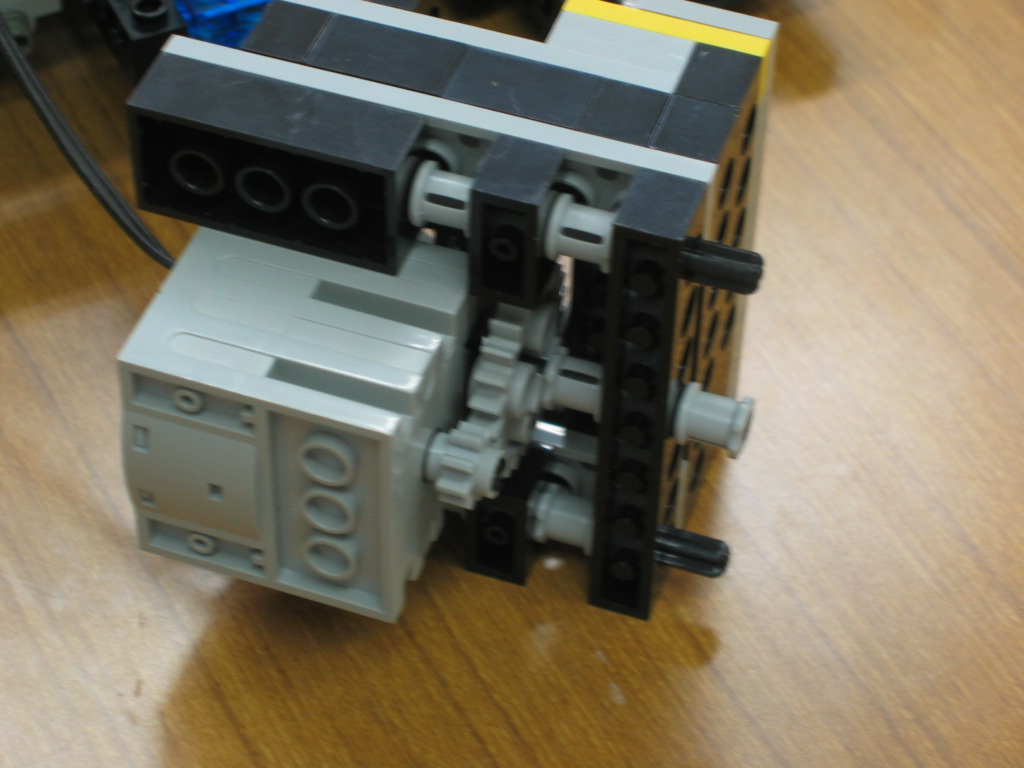
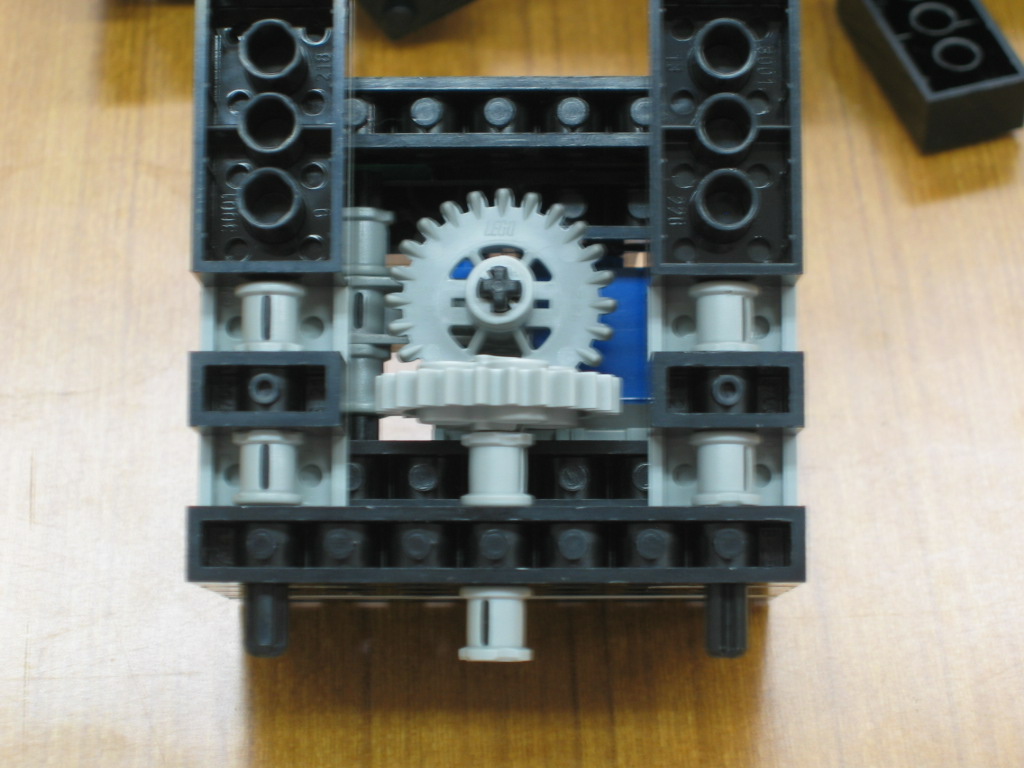
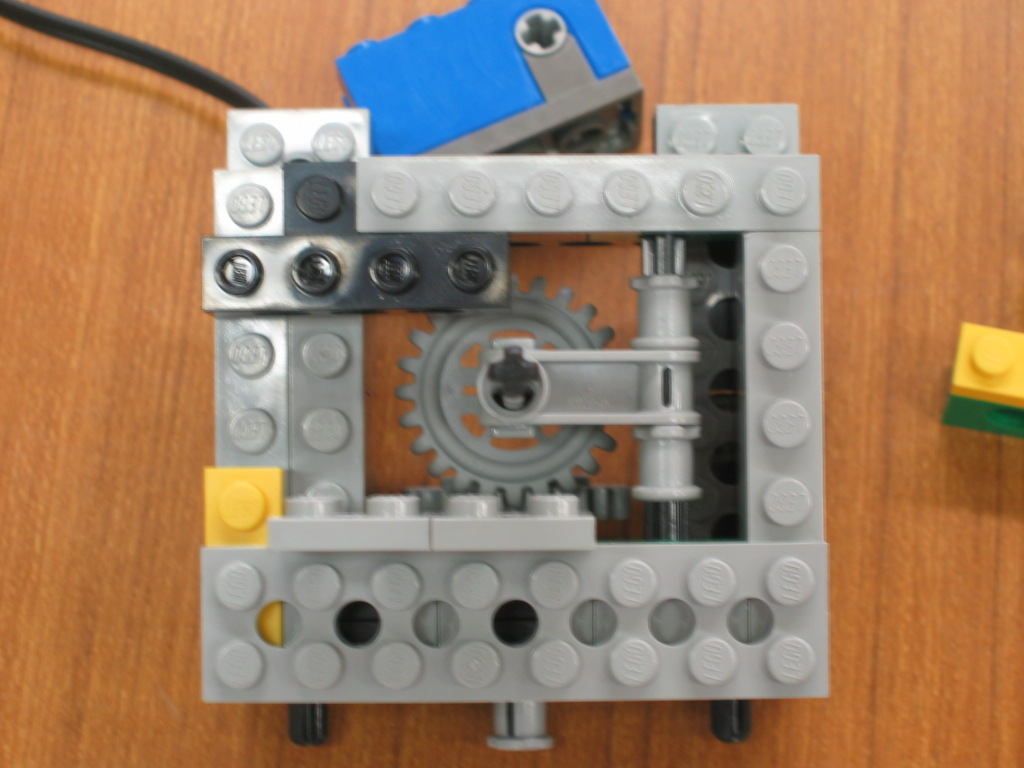
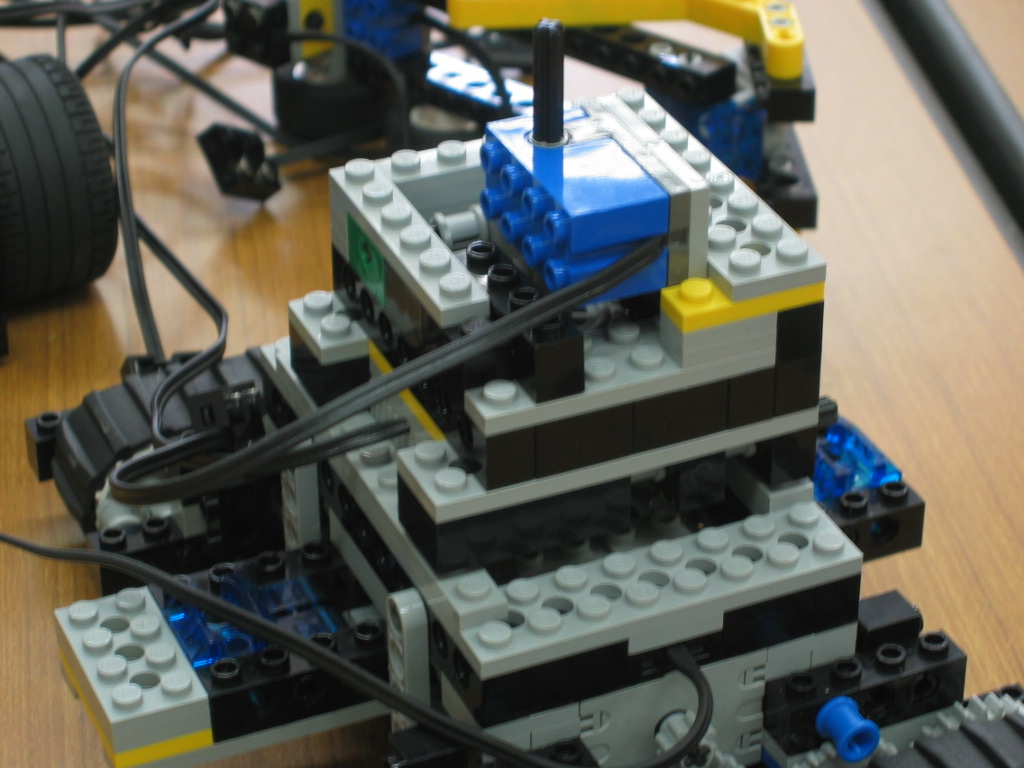
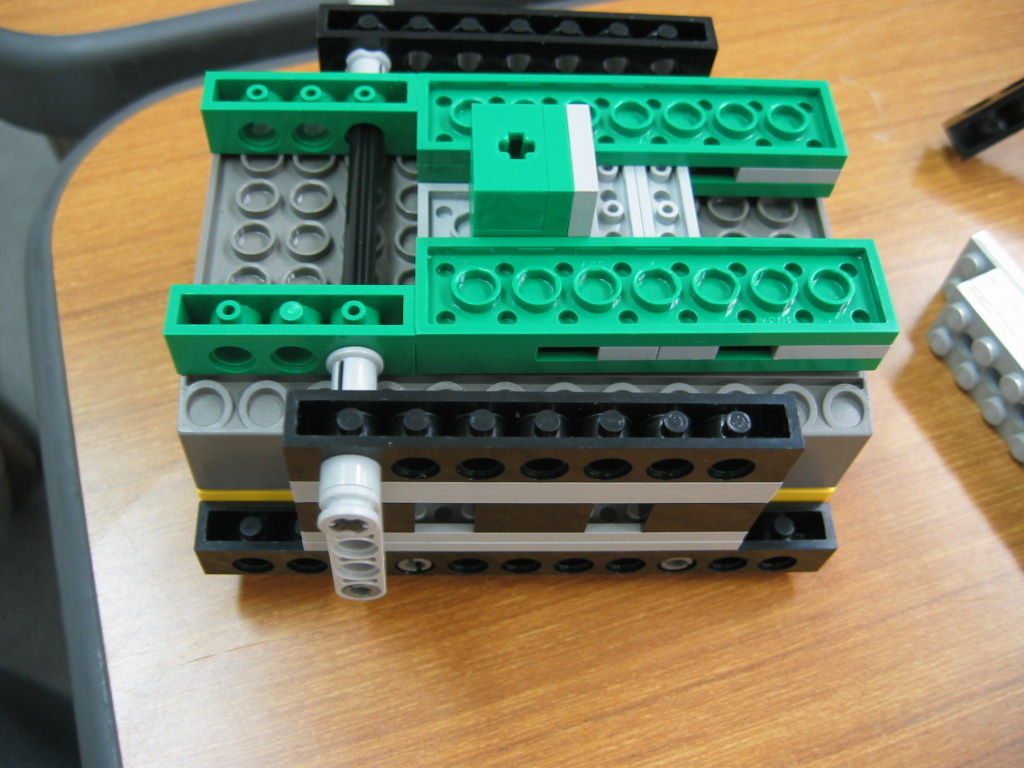
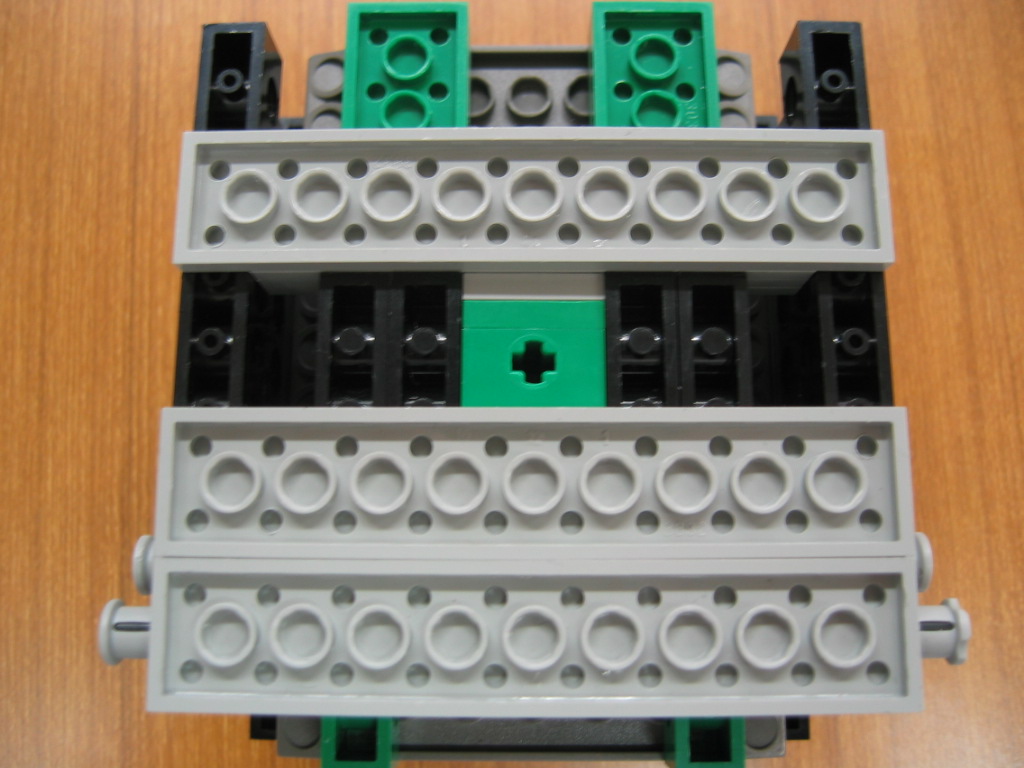
本体の作成
コントローラの作成
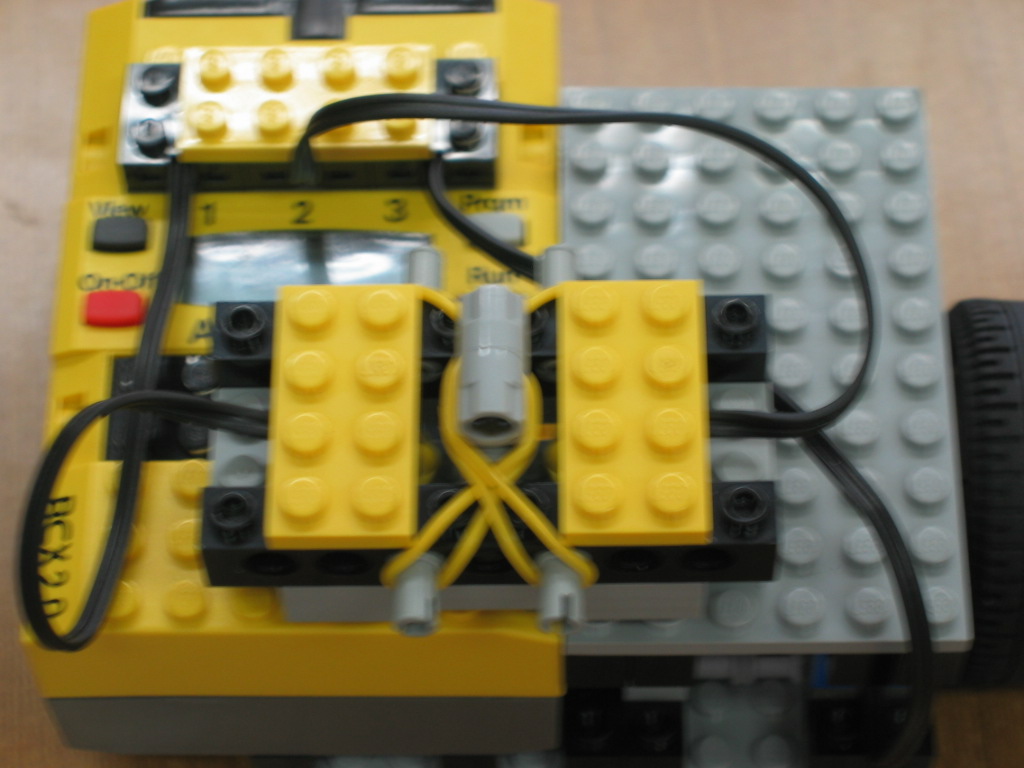
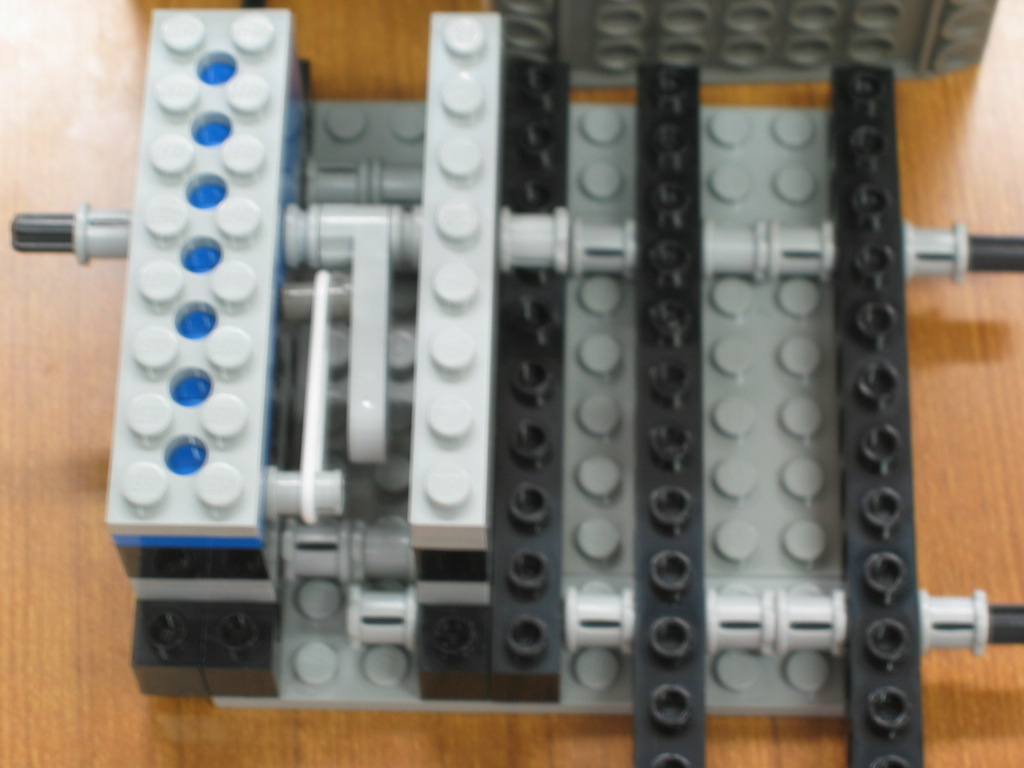
2.配線方法
本体の場合
ポートA:右のモータ
ポートB:左のモータ
ポートC:RCX回転用モータ
ポート1:ロータリーセンサー
コントローラの場合
ポート1:左検出用タッチセンサ
ポート2:右検出用タッチセンサ
ポート3:ロータリーセンサー
3.プログラム
**ファームウェアはbrickos-0.9.0を使用しています。**
本体用プログラム --- rccar.c
/*戦車*/
#include<lnp/lnp.h>
#include<conio.h>
#include<unistd.h>
#include<dsensor.h>
#include<dmotor.h>
int stop();
int drive();
wakeup_t rt_dr_wakeup(wakeup_t data);
wakeup_t rs_r_wakeup(wakeup_t data);
wakeup_t rs_l_wakeup(wakeup_t data);
tid_t t_stop, t_drive;
int main(int argc, char *argv[]) {
cputs("on");
t_stop = execi(&stop, 0, NULL, 100, DEFAULT_STACK_SIZE); // make stop task
t_drive = execi(&drive, 0, NULL, 50, DEFAULT_STACK_SIZE); // make drive task
return 0;
}
int stop(){ // rcx stop function
int stopchar;
stopchar = getchar();
if(stopchar == KEY_RUN || stopchar == KEY_ONOFF){
cputs("stop");
killall(100);
msleep(5000);
}
else{}
return 0;
}
int drive(){ // drive function
char getmsg;
int count = 0;
int rotation = 0;
ds_active(&SENSOR_1);
ds_rotation_on(&SENSOR_1);
ds_rotation_set(&SENSOR_1, 0);
while(1){
wait_event(&rt_dr_wakeup, 0); //wait for lnp_rcx_message
getmsg = lnp_rcx_message;
clear_msg();
//motor a = right
//motor b = -left
rotation = ROTATION_1;
if(getmsg == 'a'){ //fwd
motor_a_speed(MAX_SPEED);
motor_b_speed(MAX_SPEED);
motor_a_dir(fwd);
motor_b_dir(rev);
}
else if(getmsg == 'b'){ //back
motor_a_speed(MAX_SPEED);
motor_b_speed(MAX_SPEED);
motor_a_dir(rev);
motor_b_dir(fwd);
}
else if(getmsg == 'c'){ // left + fwd
motor_a_speed(MAX_SPEED);
motor_b_speed(0);
motor_a_dir(fwd);
motor_b_dir(rev);
}
else if(getmsg == 'd'){ // left + back
motor_a_speed(MAX_SPEED);
motor_b_speed(0);
motor_a_dir(rev);
motor_b_dir(fwd);
}
else if(getmsg == 'e'){ // left
count++;
motor_a_speed(MAX_SPEED);
motor_b_speed(MAX_SPEED);
motor_a_dir(fwd);
motor_b_dir(fwd);
/*************/
if(count >= 5){
motor_c_speed(MAX_SPEED);
motor_c_dir(fwd);
//rotation = ROTATION_1;
//wait_event(&rs_l_wakeup, rotation);
msleep(80);
motor_c_dir(off);
count = 0;
}
/*************/
}
else if(getmsg == 'f'){ // right + fwd
motor_a_speed(0);
motor_b_speed(MAX_SPEED);
motor_a_dir(fwd);
motor_b_dir(rev);
}
else if(getmsg == 'g'){ // right + back
motor_a_speed(0);
motor_b_speed(MAX_SPEED);
motor_a_dir(rev);
motor_b_dir(fwd);
}
else if(getmsg == 'h'){ // right
count--;
motor_a_speed(MAX_SPEED);
motor_b_speed(MAX_SPEED);
motor_a_dir(rev);
motor_b_dir(rev);
/*************/
if(count <= -5){
motor_c_speed(MAX_SPEED);
motor_c_dir(rev);
//rotation = ROTATION_1;
//wait_event(&rs_r_wakeup, rotation);
msleep(80);
motor_c_dir(off);
count = 0;
}
/*************/
}
else{
motor_a_dir(off);
motor_b_dir(off);
motor_c_dir(off);
}
msleep(90);
motor_a_dir(off);
motor_b_dir(off);
motor_c_dir(off);
}
return 0;
}
wakeup_t rt_dr_wakeup(wakeup_t data){ // lnp check for drive func
return 'a' <= lnp_rcx_message && lnp_rcx_message <='h';
}
wakeup_t rs_r_wakeup(wakeup_t data){
return ROTATION_1 < data;
}
wakeup_t rs_l_wakeup(wakeup_t data){
return ROTATION_1 > data;
}
コントローラ用プログラム --- remocon.c
/*リモコン*/
#include<lnp/lnp.h>
#include<conio.h>
#include<unistd.h>
#include<dsensor.h>
int stop();
int send_mes();
tid_t t_stop, t_send;
int main(int argc, char **argv) {
t_stop = execi(&stop, 0, NULL, 100, DEFAULT_STACK_SIZE);
t_send = execi(&send_mes, 0, NULL, 50, DEFAULT_STACK_SIZE);
return 0;
}
int stop(){ // rcx stop function
int stopchar;
stopchar = getchar();
if(stopchar == KEY_RUN || stopchar == KEY_ONOFF){
cputs("stop");
killall(100);
msleep(5000);
}
else{}
return 0;
}
int send_mes(){
char sendmsg = 'x';
ds_active(&SENSOR_3);
ds_rotation_on(&SENSOR_3);
ds_rotation_set(&SENSOR_3, 0);
while(1){
if(ROTATION_3 >= 2){ // fwd
cls();
cputs("FFFF");
sendmsg = 'a';
}
else if(ROTATION_3 <= -2){ // back
cls();
cputs("BBBB");
sendmsg = 'b';
}
else{}
if(SENSOR_2 < 0xf000 && ROTATION_3 >= 2){ // left + fwd
cls();
cputs("LFLF");
sendmsg = 'c';
}
else if(SENSOR_2 < 0xf000 && ROTATION_3 <= -2){ // left + back
cls();
cputs("LBLB");
sendmsg = 'd';
}
else if(SENSOR_2 < 0xf000){ // left
cls();
cputs("LLLL");
sendmsg = 'e';
}
else{}
if(SENSOR_1 < 0xf000 && ROTATION_3 >= 2){ // right + fwd
cls();
cputs("RFRF");
sendmsg = 'f';
}
else if(SENSOR_1 < 0xf000 && ROTATION_3 <= -2){ // right + back
cls();
cputs("RBRB");
sendmsg = 'g';
}
else if(SENSOR_1 < 0xf000){ // right
cputs("RRRR");
sendmsg = 'h';
}
else{}
send_msg(sendmsg);
cls();
cputs("----");
sendmsg = 'x';
}
return 0;
}
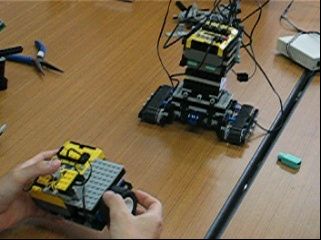
4.動作の様子
実際に動かしているときの様子です。