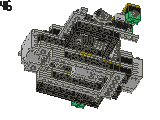
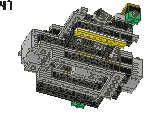
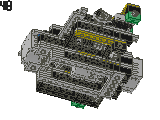
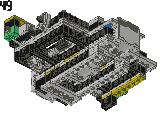
二足歩行ロボット腰部設計図