| 沼津高専 電子制御工学科 | ||||||||
| ||||||||
| 改訂記録 | ||||||||
|---|---|---|---|---|---|---|---|---|
| 版数 | 作成日 | 作成者 | 承認 | 改訂内容 | ||||
| A01 | 2006.02.14 | 鈴木 悠介 | 市川 | 初版 | ||||
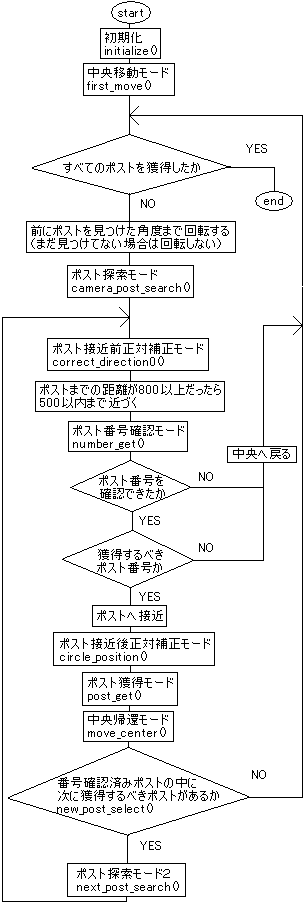
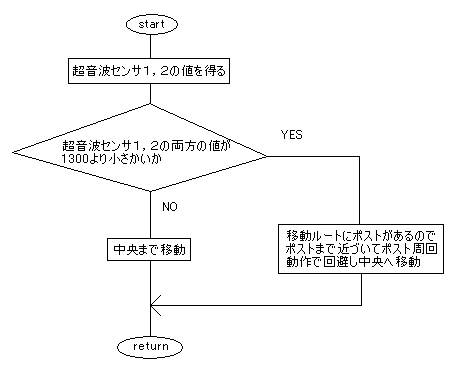
競技スタート位置から競技場中央へ移動するモード。移動ルートにポストがあったらポストを回避する。 中央付近にポストがあったらその少し手前まで移動する。
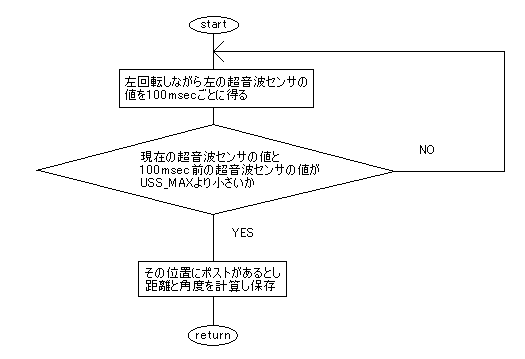
その場で左回転しながら左の超音波センサ(uss3)でポストを探索する。ポストを見つけたらそのポストの方向を向く。
前の2つの超音波センサを使ってポストに正対する。
画像処理によるポスト番号確認を行う。返り値はポスト番号。 参照:画像処理プログラム関数レファレンス
前の2つの超音波センサを使ってポストに正対し、ポストまでの距離も補正する。
ポストの周りを左回りに周回しながら左の赤外線センサでスイッチを探す。 スイッチを見つけたらスイッチの方向を向いてスイッチを押す。その後モード初期位置まで戻る。
ポスト獲得モード後、競技場中央へ戻る。
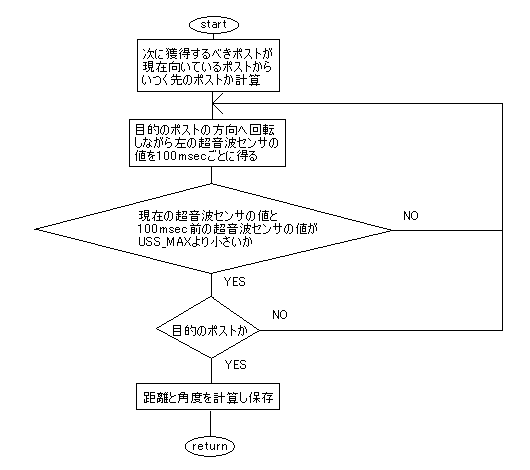
ポスト獲得後、今までに番号確認したポストの中に次に獲得するべきポストがあったらそのポストへ向く。 ポスト確認原理はcamera_post_search()と同じ。 引数は、次に向かうポスト番号-直前に獲得したポスト番号と、次に向かうポスト番号。 ここでいうポスト番号は保存したポストデータの構造体の番号。 返り値は移動した角度。
| 関連ドキュメント | |
|---|---|
| ドキュメント番号 | ドキュメント名称 |
| MIRSSTND-SOFT-0003 | MIRSSTND 標準プログラム (Ver.2.1) 概要 |
| MIRSSTND-MANU-0002 | 標準動作プログラム関数レファレンス |
| MIRSNCAM-SOFT-0011 | ソフトウェア取扱説明書 |
| MIRSNCAM-SOFT-0008 | MIRSNCAM-画像処理プログラム関数レファレンス |