Fig.1 MIRSの歴史
| 名称 | MG5 とは |
|---|---|
| 番号 | MIRSMG5D-SYST-0001 |
| 版数 | 最終更新日 | 作成 | 承認 | 改訂記事 |
|---|---|---|---|---|
| A01 | 2024.03.22 | 小谷 進 | 青木悠祐 | 初版 |
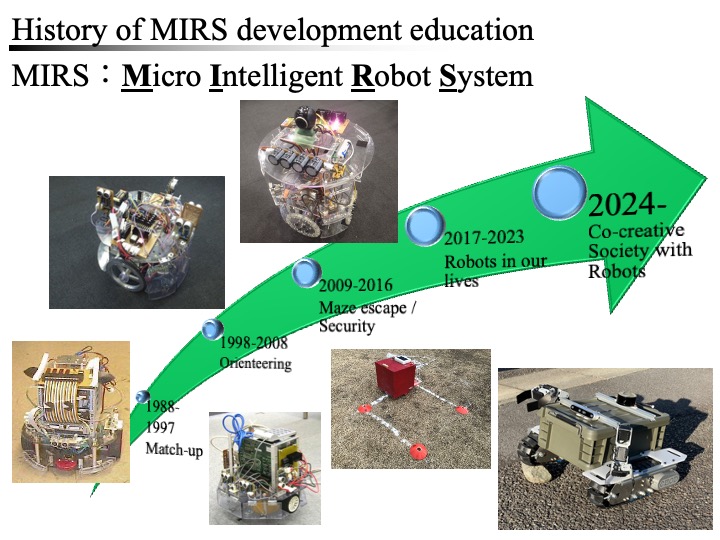
沼津高専電子制御工学科では、1988年より4年次開講の「電子機械設計製作」において、 PBL形式の小型自律移動ロボット製作をカリキュラムに取り入れている。 システムの頭文字を取り、MIRS(Micro Intelligent Robot System:ミルス)と称している。 MIRS開発教育の歴史をFig.1に示す。
Fig.1 MIRSの歴史
第4世代の標準機はゴム製タイヤを搭載した独立2輪駆動型であるが、屋外はもちろん、屋内の小さな段差であっても乗り越え不可能になるケースが多かった。
第4世代の標準機は上部に社会実装のための機能を追加するコンセプトで設計されていたが、実際に社会実装を意識し、 現場にて人とロボットによるインタラクションを実現するためには高さ方向の改良が必要であった。 その結果、重心が不安定になり、標準機そのものを改良して活用するチームも存在したことから、標準機の更新が課題となっていた。
開発したロボットを利用する実ユーザの意見が反映されない、あるいは、いないまま開発が進むことが多く、 検証のための実フィールドがないケースが存在した。
これらの点を受け、MIRS第5世代開始にあたり、プラットフォームの更新を行った。MG5の開発コンセプトは下記のとおりである。
テスト開発用電動クローラユニットCuGo V3((株)CuboRex製)を採用したことで、 最大80kgの積載性能と耐久性、アルミフレーム外装による高いカスタマイズ性、 狭いところにも入っていける機動性も兼ね備える標準機へと改良した。
第4世代にて採用したRaspberry Pi + Arduino の構成を踏襲し、
最小限の製作労力で標準的な走行体を製作を可能とするものとする。
そのために自前のハードウェアの製作をできる限り行わなくてもよいように部品を調達する。
また、制御システムを全てコンテナボックスの中に収納することで、防塵・防水性を高めるとともに、
クローラユニット + 制御ボックス + 拡張部の構成とした。
MG5ではMG4にて培った技術や、3年「電子機械基礎実習」にて実施する技術探求によって得られた成果を積極的に取り入れることにできる授業設計となっている。

Fig.2 MIRSMG5標準機