| 沼津高専 電子制御工学科 | ||||||
| ||||||
| 改訂記録 | ||||||
|---|---|---|---|---|---|---|
| 版数 | 作成日 | 作成者 | 承認 | 改訂内容 | ||
| A01 | 2015/7/9 | 牛丸 | 初版 | |||
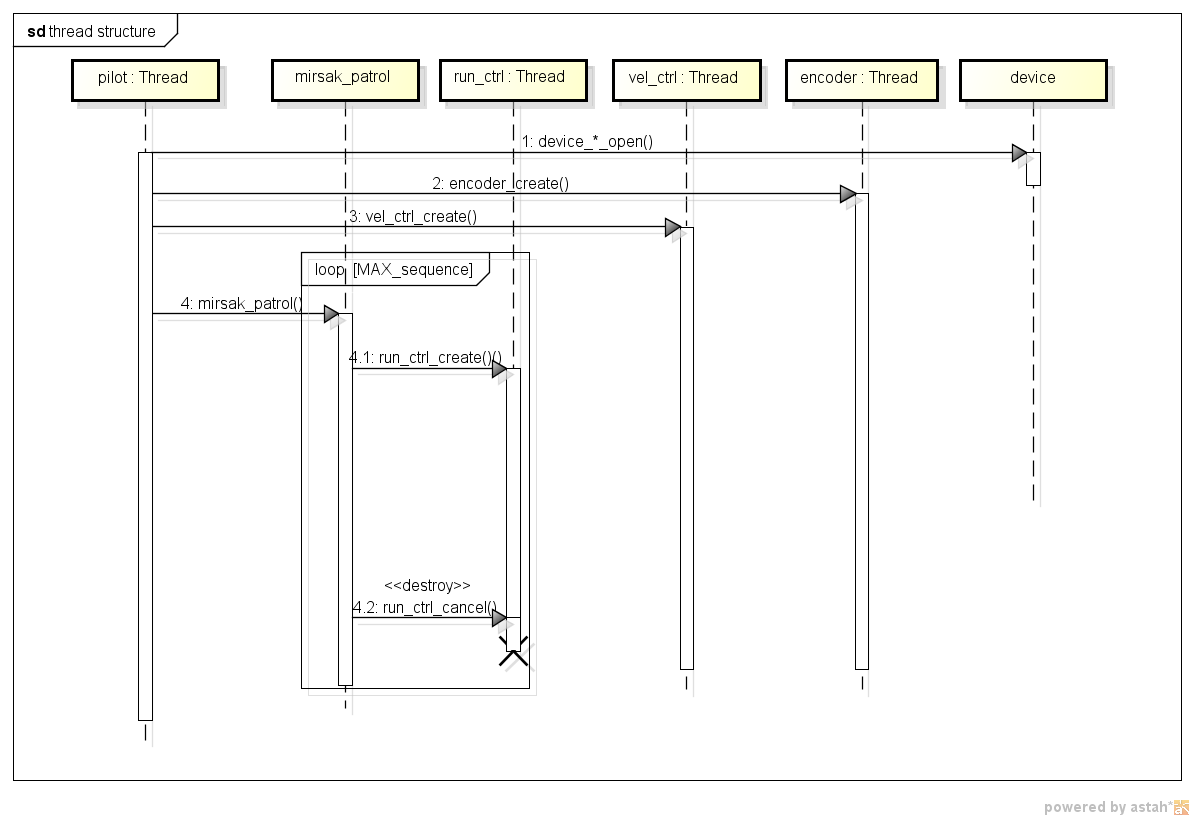
上記のスレッドの動作の関連をシーケンス図に示す。
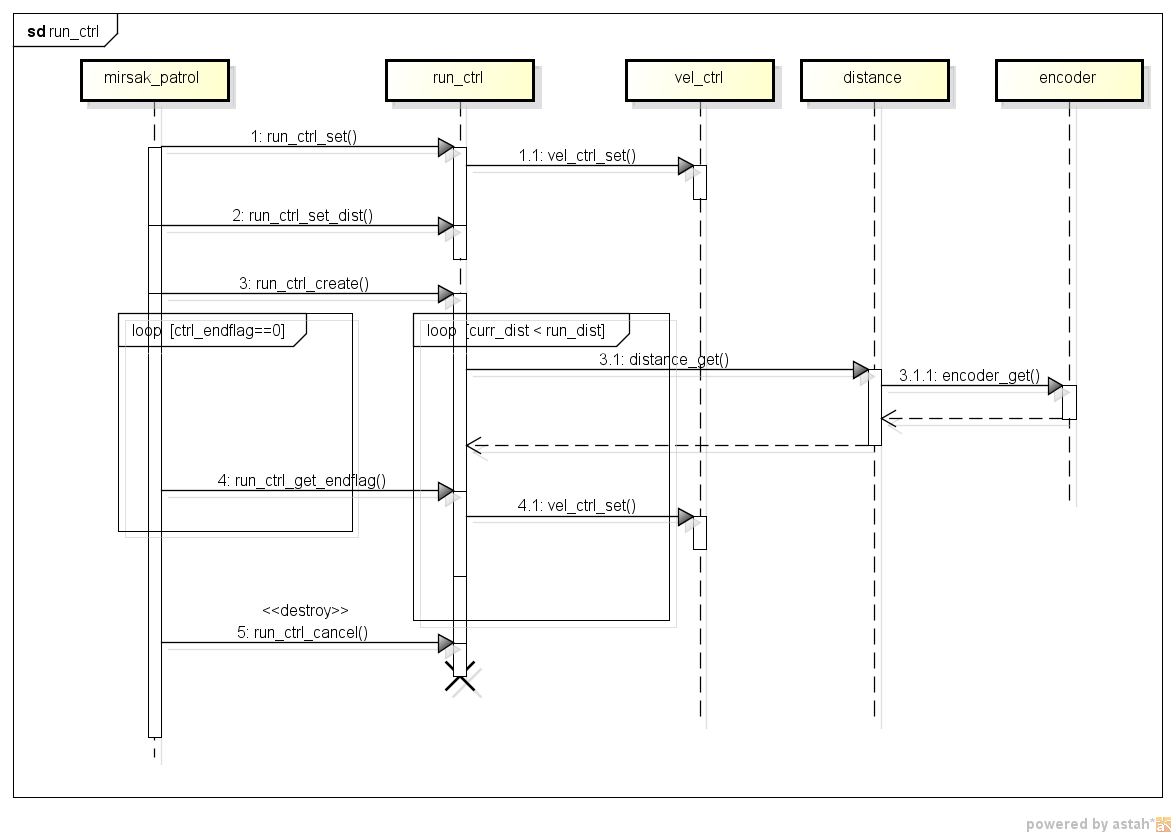
走行制御スレッドは、全体の動作シーケンスの途中で必要になった場合に生成され、 左右のタイヤの回転距離から、直進またはその場回転に必要な左右のモータの速度指令値 を計算し、その指令値を速度制御モジュールに送る。
以下にその様子をシーケンス図で示す。
mirsak_patrol は ctrl_endflag が 1 になるのを待って、走行制御スレッドを cancel する。