2.数字認識プログラムに関するデータ
これらのデータはMG3競技の決定及び、プログラム改良の参考になると思われる。
- プログラムの負荷の目安
- 処理時間の目安
- 距離と回転角度に対する認識可能範囲
- 数字の大きさと認識可能な距離
- 距離とピクセル数
- プログラムの負荷の目安をTable 1にまとめる。
このデータはプログラムの実行時に「top」というコマンドを用いて数字認識プロセスのCPU使用率、メモリ使用率を表したものである。あくまでプログラム本体のみの負荷であることに注意すること。
Table 1 画像解像度
[pixel]CPU使用率
[%]メモリ使用率
[%]160×120 13 1.4 320×240 65 1.8 640×480 90 3.5 - プログラムの処理時間の目安をTable 2にまとめる。
このデータは数字認識1ループにかかる処理時間を関数gettimeofday( )を用いて、バックグラウンドによる影響も含めて測定したものである。尚、走行系など他のプログラムは動かしていない環境で測定した。
このデータはあくまで目安であり、背景や、パラメータにより変化すると思われる。
Table 2 画像解像度
[pixel]処理時間
[sec]160×120 0.8 320×240 2.0 640×480 8.0 -
ターゲットの認識可能な回転角度と距離の関係をFig.1に示す。尚、ここでの回転軸は文字の高さ方向に取った。このときのデータをFig.1 (a),(b)に示す。
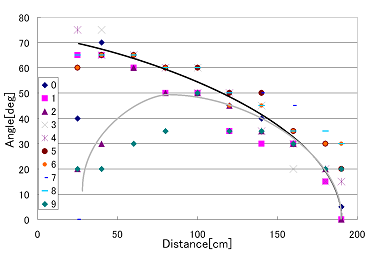
(a) 反時計回りに対するデータ
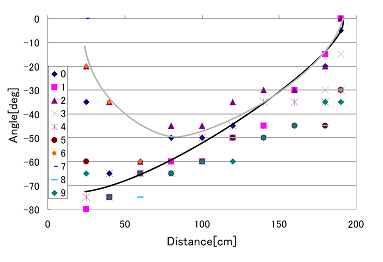
(b) 時計回りに対するデータ
Fig.1 数字の距離と回転角度に対する認識可能範囲
-
文字の大きさと認識可能な距離の関係をFig.2に示す。尚、文字の縦横比は固定されている。
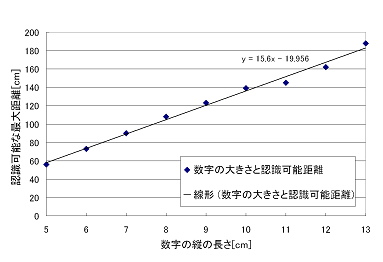
Fig.2 文字の大きさと認識可能な最大距離
-
ピクセル数と距離の逆数の関係をFig.3に示す。
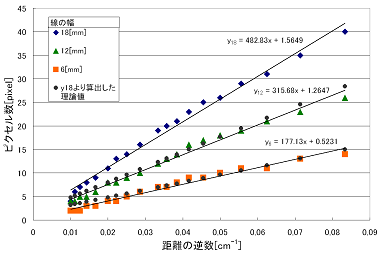
Fig.3 ピクセル数と距離の逆数