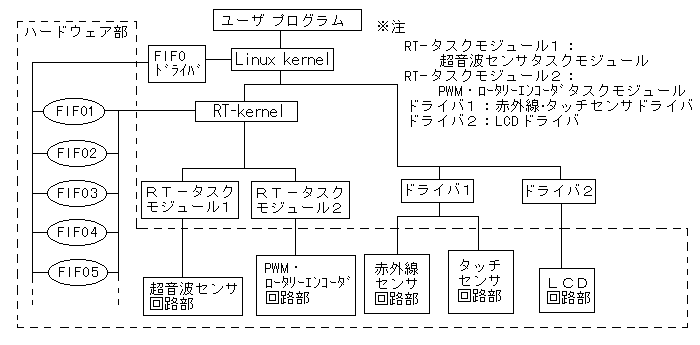
Fig. 1 僔僗僥儉峔惉恾
| 徖捗崅愱 揹巕惂屼岺妛壢 | ||||||
|
||||||
| 夵掶婰榐 | ||||||
|---|---|---|---|---|---|---|
| 斉悢 | 嶌惉擔 | 嶌惉幰 | 彸擣 | 夵掶撪梕 | ||
| A01 | 2000.10.13 | 嶳杮 | 戝掚 |
弶斉 | ||
| A02 | 2000.10.19 | 嶳杮 | 戝掚 |
僔僗僥儉峔惉恾偺岆傝掶惓 | ||
| A03 | 2000.12.20 | 嶳杮 | 嶳杮 |
僞僗僋偺堦晹摦嶌曄峏丒姺嶼幃偺岆傝掶惓 | ||
| B01 | 2001.3.12 | 嶳杮 | 挿郪 |
儌僕儏乕儖偺巇條曄峏 | ||
| B02 | 2001.5.14 | 嶳杮 | 嶳杮 |
uss_mod.tar.gz偺僼傽僀儖偺曄峏 | ||
1丏偼偠傔偵
杮僪僉儏儊儞僩偼挻壒攇僙儞僒傪惂屼偡傞儕傾儖僞僀儉僞僗僋儌僕儏乕儖偺庢埖愢柧彂偱偁傞丅
2丏僔僗僥儉撪偺埵抲
俵俬俼俽僔僗僥儉撪偱丄挻壒攇僙儞僒丒儕傾儖僞僀儉僞僗僋儌僕儏乕儖偼壓恾偺傛偆偵埵抲晅偗傜傟偰偍傝丄
俥俬俥俷侾丄俥俬俥俷俀傪梡偄偰忋埵僾儘僌儔儉偲僐儅儞僪丄僨乕僞偺傗傝庢傝傪峴偄丄挻壒攇僙儞僒傪惂屼偡傞丅
| 娭悢柤 | 宆 | 堷悢 | 摦嶌奣梫 |
| init_module | int宆 | void | FIFO1丄FIFO2偺惗惉 俥俬俥俷侾偲僐儅儞僪僴儞僪儔偺傾僞僢僠 妱崬傒僴儞僪儔偺俬俼俻愝掕乮俬俼俻亖3乯 |
| cleanup_module | void宆 | void | 俥俬俥俷侾丄俥俬俥俷俀偺嶍彍 妱崬傒俬俼俻夝曻 |
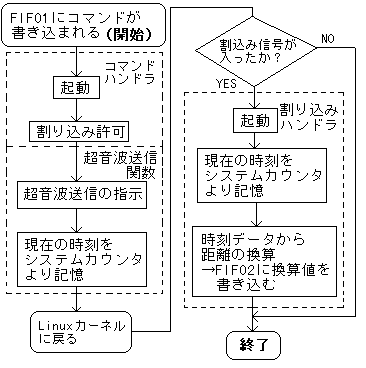
| 僐儅儞僪僴儞僪儔 (command_handler) | int宆 | int cmd | 俥俬俥俷侾偵彂偒崬傑傟偨僐儅儞僪傪丄挻壒攇憲怣娭悢偵堷悢偲偟偰搉偡 |
| 妱崬傒僴儞僪儔 (intr_handler) | unsigned int宆 | unsigned int irq, struct pt_regs *regs | 帪崗僨乕僞偺婰壇 帪崗僨乕僞偐傜嫍棧僨乕僞乮mm乯傊偺曄姺 嫍棧僨乕僞傪俥俬俥俷俀偵彂偒崬傓 |
| 挻壒攇憲怣娭悢 (transmit) | unsigned int宆 | int i | 堷悢偱梌偊傜傟偨斣崋偺僙儞僒偺挻壒攇憲怣傾僪儗僗偵僐儅儞僪傪彂偒崬傓 俴倝値倳倶僇乕僱儖偺妱崬傒嫋壜 帪崗僨乕僞偺婰壇 |
if ((fd0 = open("/dev/rtf2", O_RDONLY)) < 0) {
fprintf(stderr, "Error opening /dev/rtf2\n");
exit(1);
}
if ((ctl = open("/dev/rtf1", O_WRONLY)) < 0) {
fprintf(stderr, "Error opening /dev/rtf1\n");
exit(1);
}
num = 1;
if (write(ctl, &num, sizeof(num)) < 0){
fprintf(stderr, "uss_app: now sending commands to uss%d.\n", num);
exit(1);
}
num偼僐儅儞僪偺曄悢丅偙偺応崌丄乭侾乭偲偄偆僐儅儞僪偑俥俬俥俷侾偵彂偒崬傑傟傞丅retval = select(FD_SETSIZE, &rfds, NULL, NULL, &tv);
if (retval > 0) {
if (FD_ISSET(fd0, &rfds)) {
n = read(fd0, buf, BUFSIZE - 1);
buf[n] = 0;
}
}
| 娭楢暥彂 |
|---|