-
- 本モジュールの動作の流れを示した図を以下に示す。
- FIFO1にコマンドが書き込まれると、コマンドハンドラが起動する。コマンドハンドラは、FIFO1に書き込まれたコマンドを引き取り、超音波送信関数に引数として渡す。
- 超音波送信関数は、引数で与えられた番号の超音波センサに超音波送信の指示を出す。また、その時刻をシステムカウンタから記憶し、割込み許可の状態にする。
- 割込み信号が入ると、割込みハンドラが起動する。割込みハンドラはその時刻をシステムクロックより記憶する。その後、送信時の時刻データと先の受信時の時刻データから距離に換算する。換算式を以下に示す。
距離 = (受信時の時間 − 送信時の時間) * (331.5 + 0.61T) / (1000000 * 2)
ここでTは摂氏温度であり、本モジュールではこれを20℃としている。
換算された距離データはFIFO2に書き込まれる。
- FIFO2に値が書き込まれると、この一連の動作は終了する。(上位プログラムで、FIFO2に値が入るまで待つような設定をする。)
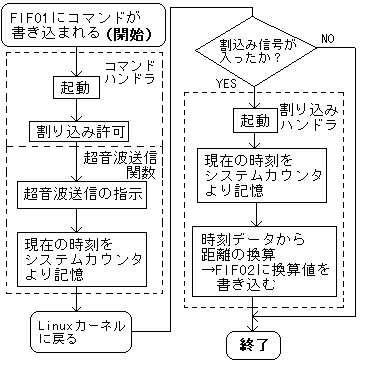
Fig.1 超音波センサタスク制御フローチャート
-
- 上位プログラムから送られてくるFIFO5からSTARTの指令とタスクの実行周期をハンドラーで読み込む。
※用いる関数:rtf_get() - STARTの指令をうけたら、左右のカウンタにリセットをかける。次にタスクが指定した周期ごとに実行されるようにする。
※用いる関数:pthread_make_periodic_np() - RT-タスクが実行を指示されたら・・・・
- 3-1. FIFO4よりPWMの速度データ(目標カウント値)を読み込み、そのデータの種類によってDUTY_MODE(duty比モード)、FDBK_MODE(フィードバック制御モード)のどちらかを実行する。
※用いる関数:rtf_get() - 3-2-1. DUTY_MODE(duty比モードの場合)
- I/Oポートの110H、112Hに読み込んだ速度データを出力する。
- 3-2-2. FDBK_MODE(フィードバック制御モードの場合)
- 目標カウント値とカウントタの積算値の偏差をとり、それを速度データとしてI/Oポートの110H、112Hに出力する。
- 3-3. 左タイヤのカウント値を関数・inw()を用いて読み込み、その後左タイヤのカウンタにリセットをかける。
- 3-4. 右タイヤのカウント値を関数・inw()を用いて読み込み、その後右タイヤのカウンタにリセットをかける。
- 3-5. 読み込んだカウント値を符号付の整数に変換し、カウント値積算用変数に加算する。
- 3-6. カウント値をFIFO3へと書き込んで、上位のプログラムへと送る。
※用いる関数:rtf_put() - この3.の動作がサスペンドをかけられるまで繰り返される。
- 3-1. FIFO4よりPWMの速度データ(目標カウント値)を読み込み、そのデータの種類によってDUTY_MODE(duty比モード)、FDBK_MODE(フィードバック制御モード)のどちらかを実行する。
- FIFO5にSTOPの指令が書き込まれて来たらハンドラーは周期タスクを停止させる。
※用いる関数:pthread_suspend_np() - ハンドラーによってRESTARTがかけられるまで待機。
※用いる関数:pthread_wakeup_np()
本ソフトウェアの制御フロー図を下に示す。
- 上位プログラムから送られてくるFIFO5からSTARTの指令とタスクの実行周期をハンドラーで読み込む。
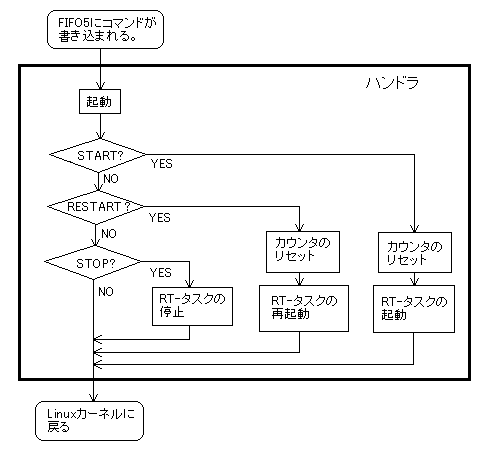
Fig.4 ハンドラの動作
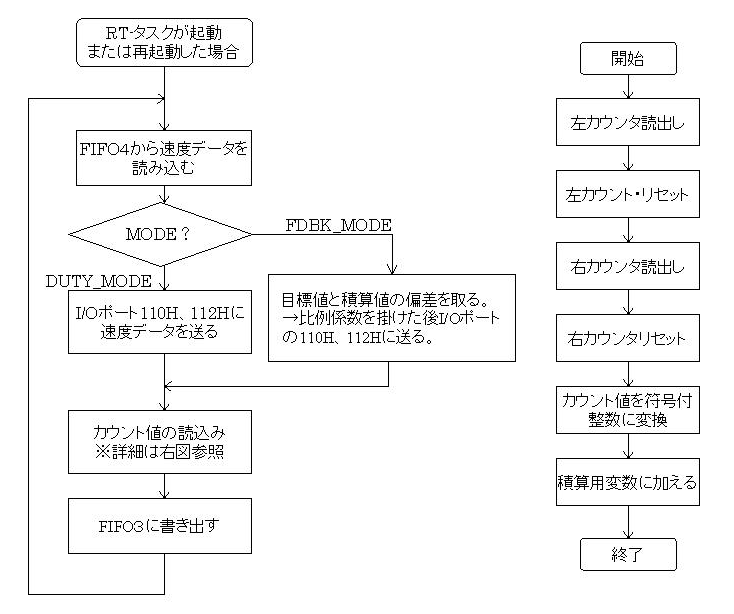
Fig.5 RT-タスクの動作
- デバイスを登録し、file構造体を呼び出す。赤外線・タッチセンサドライバのopenメソッド等の関数をこのfile構造体に定義する。
以下にそのfile構造体を示す。
static struct file_operations irs_ts_fops = { NULL, /* irs_ts_llseek */ irs_ts_read, NULL, /* irs_ts_write */ NULL, /* irs_ts_readdir */ NULL, /* irs_ts_poll */ irs_ts_ioctl, NULL, /* irs_ts_mmap */ irs_ts_open, NULL, /* irs_ts_flush */ irs_ts_release, NULL, /* irs_ts_fsync */ NULL, /* irs_ts_fasync */ NULL, /* irs_ts_check_media_change */ NULL, /* irs_ts_revalidate */ NULL, /* irs_ts_lock */ };
-
2-1 .オープン(irs_ts_open)
- I/Oポートアドレスが使用中かどうかチェックを行い、登録する。
◎用いる関数:check_region(from,extent):チェック、request_region(from,extent,driver name):登録
-
①タッチセンサ・赤外線センサ・パワーオン信号処理モジュール(I/Oポート)からデータをint型で読み込む。
◎用いる関数:inw(port)
②メソッドの引数の関係上、int型のデータをchar型に変換し、char型一次元配列に格納する。
変換の仕方は、800Aといったデータから1000 0000 0000 1010 という文字を作成し、これを順にchar型配列dataに格納(data[0]=0,data[1]=1,etc)することによって行う。(赤外線センサ0〜5→タッチセンサ0〜5→パワーオン信号の順に格納する。)ただし、1:ON、0:OFFである。
③変換したデータをユーザ空間に書き込む。
◎用いる関数:copy_to_user(user,data,lenge)
-
①タッチセンサ・赤外線センサ・パワーオン信号処理モジュール(I/Oポート)からデータをint型で読み込む。
◎用いる関数:inw(port)
②このメソッド内に定義したコマンドに応じて、タッチセンサ・赤外線センサ・パワーオン信号をそれぞれ分けてユーザ空間に書き込む。
定義したコマンドを以下に示す。
- IRS_READ:赤外線センサ信号読み出し
TS_READ:タッチセンサ信号読み出し
PO_READ:パワーオン信号読み出し
IRS_TS_HARDRESET:ドライバ利用度数リセット(いざというときドライバをアンロードできるようにしておく)
- I/Oポートアドレスを開放する。
◎用いる関数:release_region(from,extent)
◎用いる関数:unregister_chrdev (mejor_number,"driver_name")
※タッチセンサ・赤外線センサデバイスドライバを扱う上での注意:
- 現プログラムでは、ソフト的な割り込みは用意されていないので、タッチセンサ、赤外線センサ・パワーオン信号を調べたい場合は、上位プログラムが見にいく必要がある。(もし赤外線センサやタッチセンサに反応があっても、このデバイスドライバでは割り込み信号を生成しないため、ユーザが定期的に調べるようにしていないとわからない。)
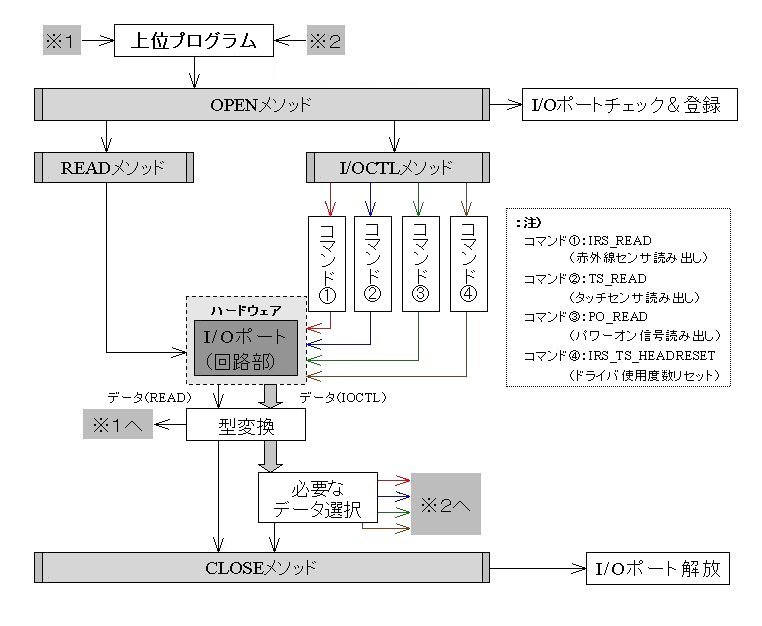
Fig.5 赤外線・タッチセンサドライバ制御フローチャート
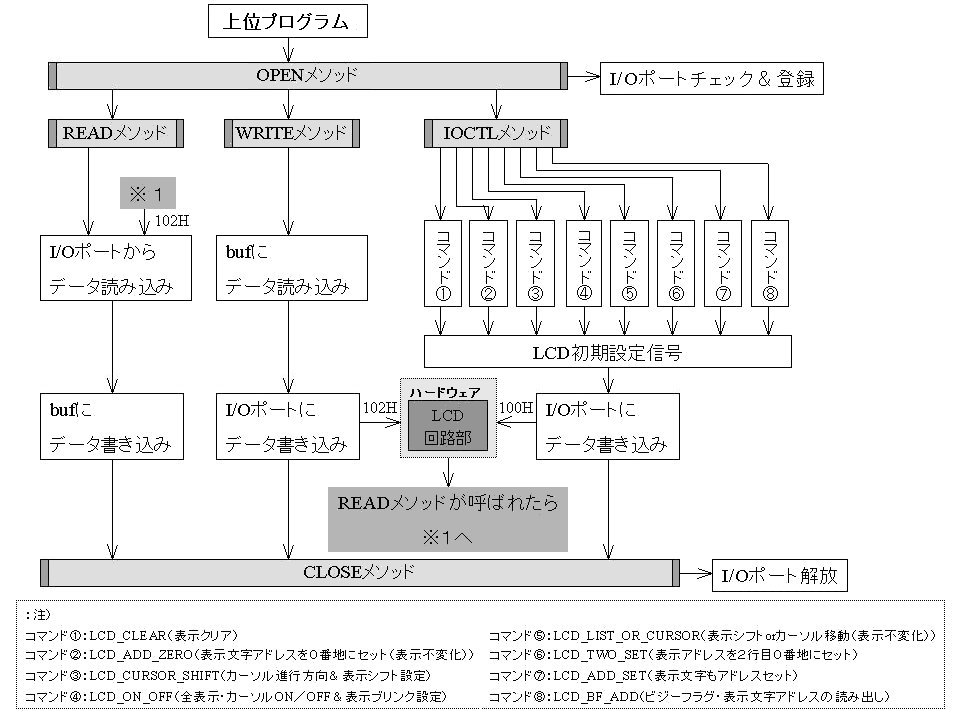
- デバイスを登録し、file構造体を呼び出す。LCDデバイスドライバのopenメソッド等の関数をこのfile構造体に定義する。
以下にそのfile構造体を示す。
static struct file_operations lcd_fops = { lcd_llseek, lcd_read, lcd_write, NULL, /* lcd_readdir */ NULL, /* lcd_poll */ lcd_ioctl, NULL, /* lcd_mmap */ lcd_open, NULL, /* lcd_flush */ lcd_release, NULL, /* lcd_fsync */ NULL, /* lcd_fasync */ NULL, /* check_media_change */ NULL, /* revalidate */ NULL, /* lock */ };
- 2-1 .オープン(lcd_open)
- I/Oポートアドレスが使用中かどうかチェックを行い、登録する。
最初にopenメソッドを呼び出したときのみ、LCDモジュールの最低限の初期設定を行う。
◎用いる関数:check_region(from,extent):チェック、request_region(from,extent,driver name):登録
-
①LCDモジュール(I/Oポート)から文字データを読み出す。
◎用いる関数:inb(port)
②その情報を文字型1次元配列として格納する。
③このデータをユーザ空間に書き込む。
◎用いる関数:copy_to_user(user,data,lenge)
-
①バッファに格納されているデータを読み込む。
②LCDモジュール(I/Oポート)に文字データを書き込む。
◎用いる関数:outb(char,port)
- このメソッドは、LCDモジュールの初期設定を行う。コマンドを複数用意し、それによって表示クリアやカーソル位置などを設定する。(詳しくは取扱い説明書&単体試験仕様書に記載する。)
定義したコマンドを以下に示す。
-
LCD_CLEAR:表示クリア
LCD_ADD_ZERO:表示内容を変えずにアドレスを0番地にセット
LCD_CURSOR_SHIFT:カーソルの進行方向&表示シフト設定
LCD_ON-OFF:全表示のON/OFF&カーソルのON/OFF&文字のブリンク設定
LCD_LIST_OR_CURSOR:表示シフトorカーソル移動(表示不変化)設定
LCD_TWO_SET:アドレスを2行目0番地にセット
LCD_ADD_SET:表示文字のアドレスセット
LCD_BF_ADD:ビジーフラグ&表示アドレスの読み出し
LCD_HARDRESET:ドライバ利用度数リセット(いざというときドライバをアンロードできるようにしておく)
- I/Oポートアドレスを開放する。
◎用いる関数:release_region(from,extent)
◎用いる関数:unregister_chrdev (mejor_number,"driver_name") ※LCDデバイスドライバを扱う上での注意:
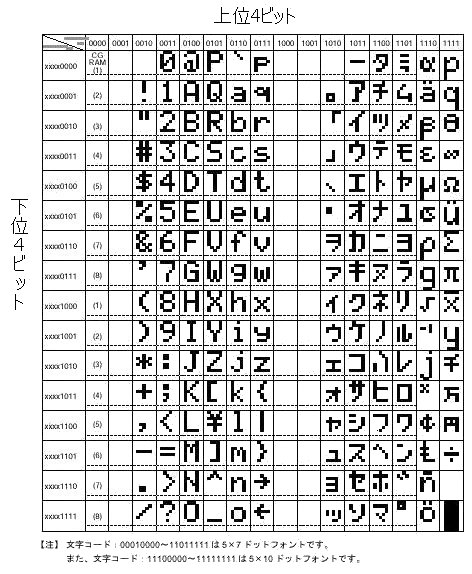
- 以下のアプリケーションインターフェースに、LCDモジュールの文字変換表を示す。LCDモジュールは、カタカナやギリシャ文字なども表示できるが、MIRSATLMプロジェクトでは表示の必要性がないので、LCDデバイスドライバはそれらの文字を表示する機能を有しない。よって、LCDデバイスドライバに書き込める文字はアスキーコード表に記されているもののみとする。
また、2行分の文字を1度に書き込むときは、1行目に表示したい文字と2行目に表示したい文字の間に『^』を挿入することでできる。