


| 沼津高専 電子制御工学科 | |||||||
| |||||||
| 改訂記録 | |||||||
|---|---|---|---|---|---|---|---|
| 版数 | 作成日 | 作成者 | 承認 | 改訂内容 | |||
| A01 | H11.11.09 | 桑名、和田 | 小澤 | 初版 | |||
| A02 | H11.11.18 | 桑名 | 小澤 | アニメーション、線表の追加。図を全面更新。細部を更新 | |||
| B01 | H12.4.28 | 小澤 | 小澤 | 動作の変更、それに伴うプログラムの変更、外観の変更、線表の変更、細部を更新 | |||
| B01 | H12.6.21 | 小澤 | 小澤 | 動作の結果の決定 | |||
本文書は、MIRS9904における作業について、その行程と内容をまとめたものである。
・外観イメージ
flg1外観図
・動作の概要


①.競技場内のポールを置くことができる210cm×210cmの正方形を15cm×15cmの正方形に区切って考える→fig2参照
②.①の事柄を現実に実行するために座標をfig3のようにとる。


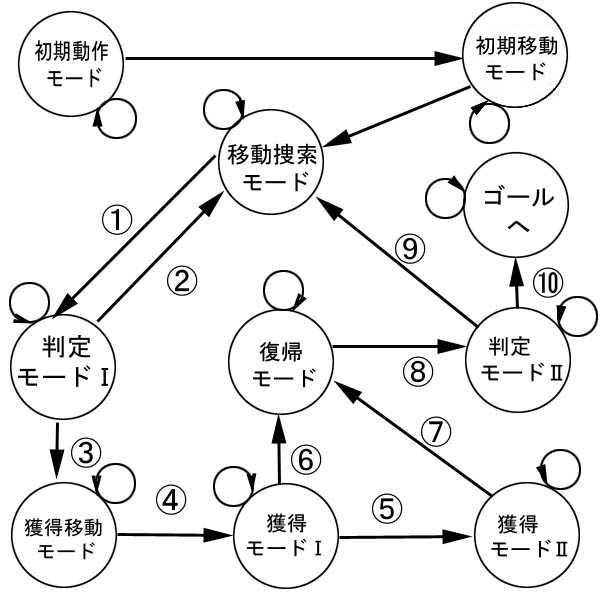
flg7 遷移図
遷移条件
| ①実距離90cm以下の超音波の検出があった。 | ②ポストの座標が記憶している座標と一致する |
| ③ポストの座標が記憶している座標と一致しない | ④タッチセンサの反応があった |
| ⑤赤外線が検出された | ⑥2周しても赤外線の検出が無い |
| ⑦赤外線が検出されなくなった | ⑧周回運動を始めた座標まで戻った |
| ⑨ポストを全部獲得していない | ⑩ポストを全部獲得している |
各モードについて
初期動作モード(座標確認モード)
超音波センサを四方に発信し、それを元に現在位置の座標を割り出す(座標は絶対座標)
初期移動モード
割り出された座標を元にX軸の中心方向に移動出来るように、MIRSの方向を変える。
移動
捜索モード
図を参照。
この行動を行うときに壁と反対側の超音波センサでポストを捜索する
判定モードⅠ
ポストがあると認識したら、記憶した座標を元にそのポストが獲得するべきかしないべきか判定
獲得モードⅠ
①ポストの方向にタッチセンサが反応するまで直進する。
②タッチセンサが反応したらその場からMIRSがMIRSが回転できる距離だけ後退する。
③ロータリエンコーダを使用し、ポストの回りをMIRSがその場で回転できるほどの距離を残して周回運動をおこなう。
獲得モードⅡ
①赤外線センサにより赤外線=LEDを検出したらMIRSの向きをLEDの方向に回転させる。
②スイッチに向かいタッチセンサが反応するまで直進する。
③タッチセンサが反応したら赤外線センサが赤外線を検出できる距離まで後退する。
④赤外線が検出されるのならば②までもどる。
復帰モード
獲得モードⅠの時に進んだ方向と同じ方向に周回運動をし、周回運動を始めた場所まで戻り、壁に向かう。
判定モードⅡ
すべてのポストを獲得しているか判断
2回目の本選について
一回目の本選で記憶した座標を元に壁に沿って移動する行動を省き、
ポストから次のポストに最短距離で移動できるようにする3 システム設計方針
| コード番号 | 作業名称 | 作業概要 | 成果物名称 |
| 01-01-01 | 赤外線センサの調査 | MIRSで使用する赤外線センサについて調査する。 | 調査結果 |
| 01-01-02 | 超音波センサの調査 | MIRSで使用する超音波センサについて調査する。 | 調査結果 |
| 01-01-03 | タッチセンサの調査 | MIRSで使用するタッチセンサについて調査する。 | 調査結果 |
| 01-01-04 | ロータリーエンコーダの調査 | MIRSで使用するロータリーエンコーダについて調査する。 | 調査結果 |
| 01-01-05 | PWMの調査 | MIRSで使用するPWMについて調査する。 | 調査結果 |
| 01-01-06 | I/Osubボードの調査 | MIRSで使用するI/Osubボードについて調査する。 | 調査結果 |
| 01-01-07 | I/Oボードの調査 | MIRSで使用するI/Oボードについて調査する。 | 調査結果 |
| 01-01-08 | VMEラックの調査 | MIRSで使用するVMEラックについて調査する。 | 調査結果 |
| 01-01-09 | CPUボードの調査 | MIRSで使用するCPUボードについて調査する。 | 調査結果 |
| 01-01-10 | ソフトウェアの調査 | MIRSで使用するソフトウェアについて調査する。 | 調査結果 |
| 01-01-11 | MPUインターフェースの調査 | MIRSで使用するMPUインターフェースについて調査する。 | 調査結果 |
| 01-01-20 | システム案作成 | MIRS競技に参加するシステムを提案する。 | システム案 |
| 01-01-21 | システム分析 | MIRS9904のシステムを分析する。 | 分析結果 |
| 01-02-01 | システム計画書作成 | MIRS9904のシステム開発計画書を作成する。 | システム計画書 |
| 02-01-01 | システム基本機能の検討 | MIRS9904システムの基本機能を検討する。 | 検討結果 |
| 02-01-02 | 走行制御の実現に関する検討 | MIRS9904システムの走行制御実現のための検討をする。 | 検討結果 |
| 02-02-01 | メカニクス基本設計検討 | メカニクス部の基本設計について検討する。 | メカニクス基本設計 |
| 02-02-02 | メカニクス基本設計書作成 | メカニクス部の基本設計書を作成する。 | メカニクス基本設計 |
| 02-02-03 | エレクトロニクス基本設計検討 | エレクトロニクス部の基本設計について検討する。 | エレクトニクス基本設計 |
| 02-02-04 | エレクトロニクス基本設計書作成 | エレクトロニクス部の基本設計書を作成する。 | エレクトロニクス基本設計書 |
| 02-02-05 | ソフトウェア基本設計検討 | ソフトウェア部の基本設計について検討する。 | ソフトウェア基本設計 |
| 02-02-06 | ソフトウェア基本設計書作成 | ソフトウェア部の基本設計書を作成する。 | ソフトウェア基本設計書 |
チームのシステム開発体制図
| 担当 | 氏名 |
| チームマネージャ ・ ソフト担当 | 山崎 訓志 |
| ドキュメントマネージャ ・ エレキ担当 | 小澤 悠一 |
| メカ担当 | アズハン |
| ソフト担当 | 桑名 良和 |
| エレキ担当 | 小林 亮介 |
| メカ担当 | 吉川 佳寛 |
| メカ担当 | 若杉 さおり |
| エレキ担当 | 渡邉 友基 |
| ソフト担当 | 和田 直幹 |
開発工程表(WBS図のコード番号,作業の名称、担当者、期間)
| コード番号 | 作業名称 | 担当者 | 期限 |
| 01-01-01 | 赤外線センサの調査 | アズハン・山崎 | H11,12,09 |
| 01-01-02 | 超音波センサの調査 | 小澤 | H11,12,09 |
| 01-01-03 | タッチセンサの調査 | 桑名 | H11,12,09 |
| 01-01-04 | ロータリーエンコーダの調査 | 小林 | H11,12,09 |
| 01-01-05 | PWMの調査 | 吉川 | H11,12,09 |
| 01-01-06 | I/Osubボードの調査 | 若杉 | H11,12,09 |
| 01-01-07 | I/Oボードの調査 | 渡邉 | H11,12,09 |
| 01-01-08 | VMEラックの調査 | 和田 | H11,12,09 |
| 01-01-09 | CPUボードの調査 | アズハン・山崎 | H11,12,14 |
| 01-01-10 | ソフトウェアの調査 | 小澤 | H11,12,14 |
| 01-01-11 | MPUインターフェースの調査 | 桑名 | H11,12,14 |
| 02-01-01 | システム基本機能の検討 | 全員 | H12,1,18 |
| 02-02-01 | メカニクス基本設計検討 | 若杉・吉川・アズハン | H12,1,27 |
| 02-02-02 | メカニクス基本設計書作成 | 若杉・吉川・アズハン | H12,02,01 |
| 02-02-03 | エレクトロニクス基本設計検討 | 渡邉・小林・小澤 | H12,01,27 |
| 02-02-04 | エレクトロニクス基本設計書作成 | 渡邉・小林・小澤 | H12,02,01 |
| 02-02-05 | ソフトウェア基本設計検討 | 桑名・和田・山崎 | H12,01,27 |
| 02-02-06 | ソフトウェア基本設計書作成 | 桑名・和田・山崎 | H12,02,10 |
| 基本設計書・開発計画書完成 | 小澤 | H12,04,27 | |