(1)超音波の性質
で計算された。
(2)超音波センサーの構成
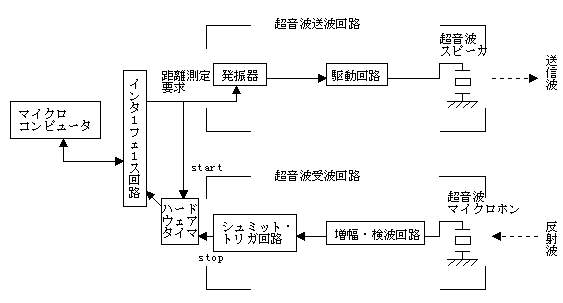
図1 超音波センサの構成
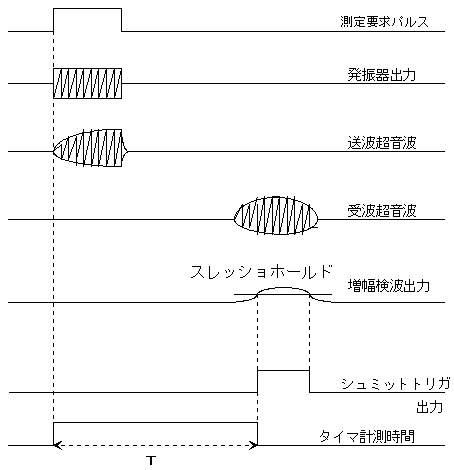
図2 超音波波形とタイミング
(3)空中超音波センサーMA40S2R/Sの諸特性
| 品名 | MA40S2R | MA40S2S |
| 項目 | 受 信 用 | 送 信 用 |
| 公称周波数 | 40KHz | 40KHz |
| 感度・音圧 | -74dB以上 | 100dB以上 |
| 帯域幅 | 6KHz以上(-80dB) | 7KHz以上(90dB) |
| 静電容量 | 1600pF | 1600pF |
| 絶縁抵抗 | 100MOhm以上 | 100MOhm以上 |
| 温度特性 | -20- +60 C において感度。 音圧の変化は ー10dB以内 | -20- +60 C において感度。 音圧の変化は ー10dB以内 |
(4)I/OSubボードのポート割り当て(インタフェース)
(表2)
| 論理名 | R/W | DATA | 内容 | |||||||
|---|---|---|---|---|---|---|---|---|---|---|
| D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 | |||
| PGCR2 | W | 0 | 0 | 1 | 1 | 1 | 0 | 0 | 0 | portをモード0に設定、H1,H3をenable |
| PACR2 | W | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | portAをサブモード00に設定 |
| PADR2 | R | - | - | * | * | - | - | - | - | 折返しセンサ選択信号 |
| R | - | - | - | - | - | * | - | - | アンダーフローデータ | |
| W | - | - | - | - | - | - | * | * | 超音波センサ選択信号 | |
| PADDR2 | W | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 1 | 方向を設定 ("0"=input,"1"=output) |
| TCR2 | W | 1 | 0 | 1 | 1 | 0 | 0 | 1 | * | タイマを設定 (D0が"0"でHalt、"1"でenable) |
| CPR2 | W | 0 | 0 | 0 | 1 | 1 | 1 | 1 | 0 | カウンタの設定値 (T) |
| CPR2+0x2 | W | 0 | 1 | 1 | 0 | 0 | 1 | 0 | 1 | カウンタの設定値 (H) |
| CPR2+0x4 | W | 0 | 1 | 1 | 1 | 1 | 1 | 0 | 1 | カウンタの設定値 (M) |
| CPR2+0x6 | W | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | カウンタの設定値 (L) |
| CNTR2+0x2 | R | * | * | * | * | * | * | * | * | カウンタ値 (下位) |
| CNTR2+0x4 | R | * | * | * | * | * | * | * | * | カウンタ値 (中位) |
| CNTR2+0x6 | R | * | * | * | * | * | * | * | * | カウンタ値 (上位) |
(5)超音波の指向性と反射特性
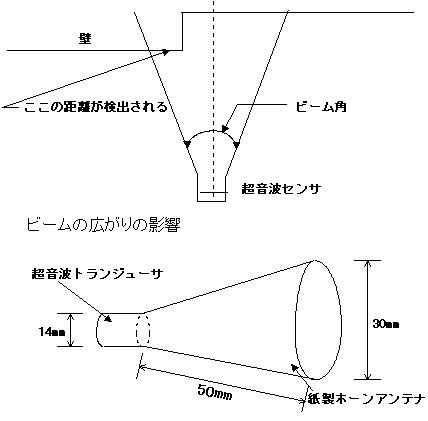
図4-1 紙性ホーンアンテナの例
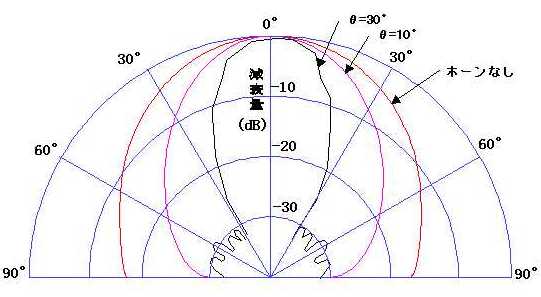
図8-2 超音波の指向性
超音波のような波が対象物に当たった場合、対象物が凹凸のある表面を持っていたとするならば、超音波は散乱しあらゆる方向に反射波が進んでいく。しかし鏡面を持っていたとすると入射角と反射角の関係から反射波は反射角の方向にしか観測されない。センサに対して斜めの鏡面は観測されにくいと思われる。まして相手 MIRS を検出するのはさらに難しいであろう。試作品を製作し、実験をする必要があると思われる。超音波にとってどの程度までが散乱面なのかは波長λから知ることが出来る。以下にその関係式を示す。
(6)超音波センサの定格
| 構造 | 送信・受信専用 (R:受信用 S:送信用 |
| 品名 | MA40B5R/S |
| 特徴 | 凡用・広帯域 |
| 公称周波数/TD> | 40kHz |
| 感度 | -47dB以上 |
| 音圧 | 112dB以上 |
| 指向性(半域全角) | 0° |
| 静電容量 | 2000pF |
| 分解能 | 9 |
| 検知距離 | 0.2~6.0m |
| 関連文書 |
|---|