| 徖捗崅愱 揹巕惂屼岺妛壢 | |||||||
| |||||||
| 夵掶婰榐 | |||||||
|---|---|---|---|---|---|---|---|
| 斉悢 | 嶌惉擔 | 嶌惉幰 | 彸擣 | 夵掶撪梕 | 採弌愭 | ||
| A01 | 1998.12.15 | 昳愳 | 悪杮 | 弶斉 | |||
庡巪
愒奜慄僙儞僒偺庬椶
巜岦摿惈
愒奜慄僙儞僒乕偺挷嵏偵梡偄傞僒億乕僩僜僼僩僂僃傾
愒奜慄僙儞僒偲憲怣婡乮徻嵶乯
愒奜慄僙儞僒怣崋張棟夞楬
僔僗僥儉庡梫峔惉晹昳偺傂偲偮偱偁傞愒奜慄僙儞僒偵偮偄偰偦偺婎杮惈擻媦傃摿惈傪挷嵏丄棟夝偟丄俵俬俼俽偵偍偗傞棙梡曽朄傪専摙偡傞丅
丂検巕宆
僼僅僩儞傪媧廂偟僉儍儕傾傪椼婲偡傞偙偲偵傛偭偰捈愙愒奜慄傪専弌偡傞僙儞僒偱偁傞丅偙偺僙儞僒偼屻偵弎傋傞擬宆僙儞僒傛傝100乣1000攞偺専弌擻椡傪帩偮偑丄摦嶌壏搙偑掅偄偨傔捠忢偼塼懱拏慺側偳偱椻媝偺昁梫偑偁傞偨傔丄俵俬俼俽偱偺棙梡偼朷傔側偄丅
丂擬宆
僄僱儖僊乕媧廂偵傛傞壏搙曄壔傪棙梡偡傞傕偺丅慺巕偲偟偰偼丄擬揹懳僒乕儈僗僞丒儃儘儊乕僞丄徟揹宆慺巕側偳偑偁傞丅摿偵徟揹宆慺巕偼斾妑揑姶搙偑崅偔丄峔憿偑娙扨側偺偱傛偔梡偄傜傟傞丅
|
|
|
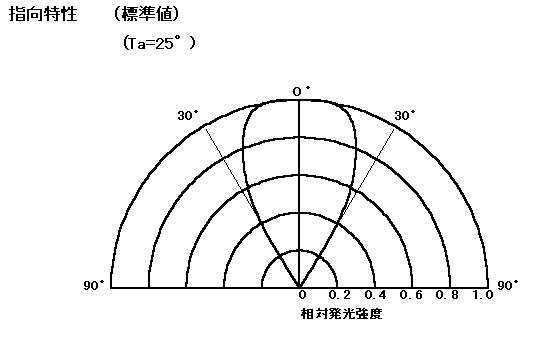
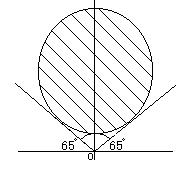
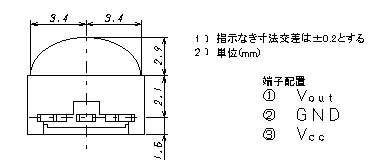
丂 仸3)丂庴岝柺徠搙傪帵偡丅
|
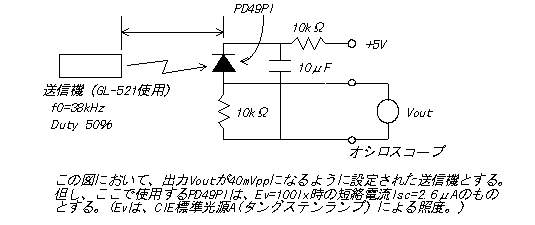
| 恾侾丂憲怣婡丂 |
|
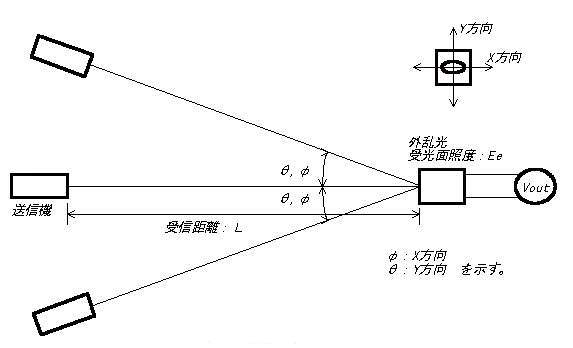
| 恾俀丂岝妛宯 |
|
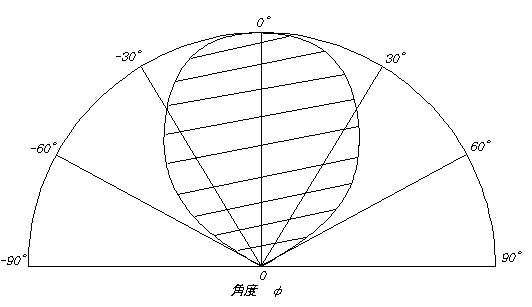
| X曽岦摿惈 |
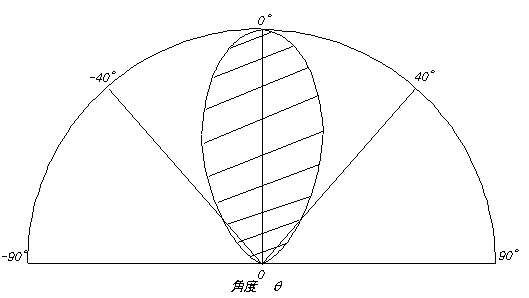
|
| Y曽岦摿惈 |
|
| X曽岦摿惈 |
>bf 10000 50000 00
>.r0 0+r7
>lo0
>.PC 20008
>go
| 崁丂丂丂栚 | 婰崋 | 掕奿 | 扨埵 |
| 捈棳弴揹棳 | IF | 100 | mA |
| 捈棳弴揹棳掅尭棪乮俿a>25亷乯 | 儮IF/亷 | -1.33 | mA/亷 |
| 僷儖僗弴揹棳 | IFP(拲乯 | 1 | A |
| 捈棳媡揹埑 | VR | 5 | V |
| 嫋梕懝幐 | PD | 150 | mW |
| 摦嶌壏搙 | Topr | -20乣75 | 亷 |
| 曐懚壏搙 | Tstg | -30乣100 | 亷 |
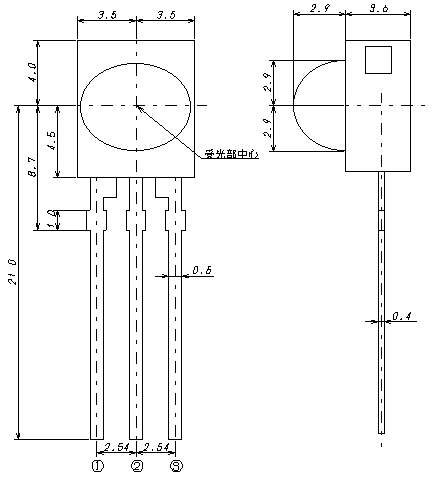
奜宍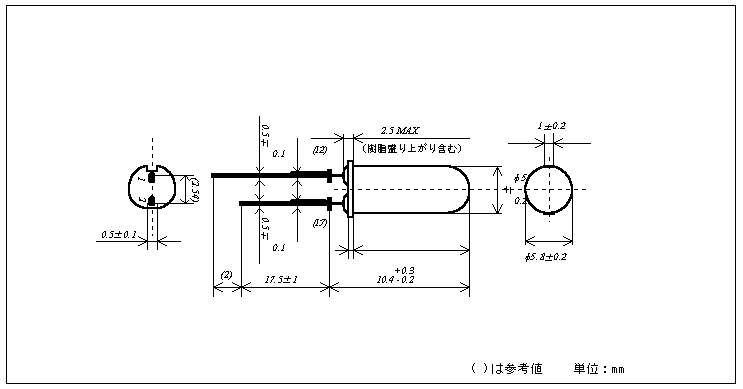 |
| 崁栚 | 婰崋 | 應掕忦審 | 嵟彫 | 昗弨 | 嵟戝 | 扨埵 |
| 弴揹埑 | VF | IF=100mA | --- | 1.35 | 1.5 | V |
| 媡揹埑 | IR | VR=5V | --- | --- | 10 | 兪A |
| 曻幩嫮搙 | IE | IF=50mA | 12 | 20 | --- | mW/sr |
| 岝弌椡 | PO | IF=50mA | --- | 11 | --- | mW |
| 抂巕娫梕検 | CT | VR=0,f=1MHz | --- | 20 | --- | pF |
| 僺乕僋敪岝攇挿 | 兩P | IF=50mA | --- | 950 | --- | nm |
| 僗儁僋僩儖敿抣暆 | 儮兩 | IF=50mA | --- | 50 | --- | nm |
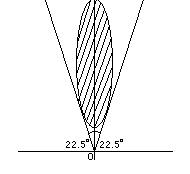
| 敿抣妏 | 兤1/2 | IF=50mA | --- | 亇23.5 | --- | 亱 |
攇挿摿惈乮昗弨抣乯(IF=50mA,Ta=25亷)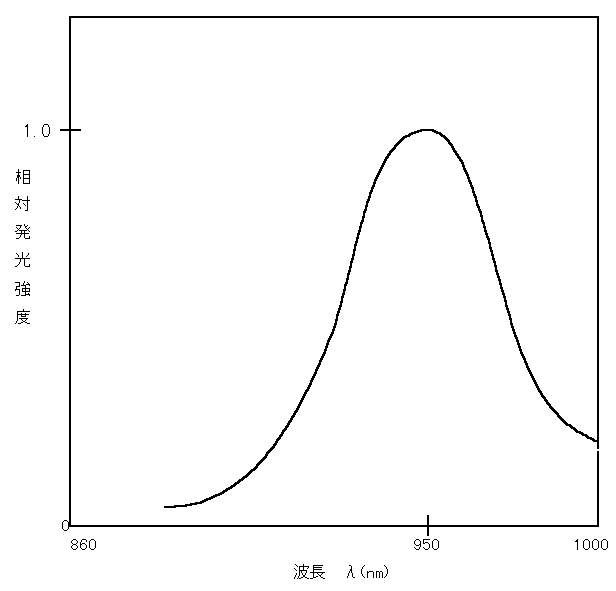 |
掕奿媦傃摿惈
峔惉恾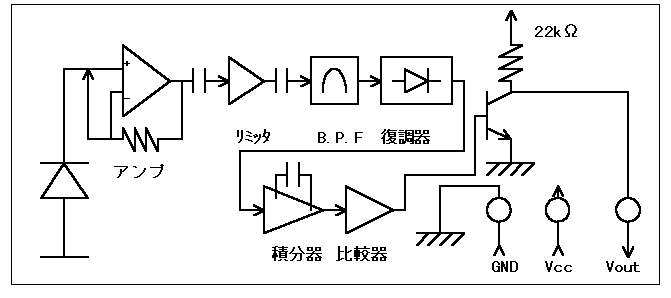 |
| 崁栚 | 婰崋 | 掕奿抣 | 扨埵 |
| 揹尮揹埑 | Vcc | 0乣6.0 | V |
| 摦嶌壏搙 | Topr | -10乣+60 仸1 | 亷 |
| 曐懚壏搙 | Tstg | -20乣+70 | 亷 |
| 曐懚壏搙 | Tsol | 260 仸2 | 亷 |
| 崁栚 | 婰崋 | 摦嶌忦審 | 扨埵 |
| 揹尮揹埑 | Vcc | 4.7乣5.3 | V |
| 崁栚 | 婰崋 | MIN | TYP | MAX | 扨埵 | 旛峫 |
| 徚旓揹棳 | Icc | --- | 2.8 | 4.5 | mA | 擖椡岝側偟丄弌椡抂巕OPEN |
| 僴僀儗儀儖弌椡揹埑 | VOH | Vcc-0.2 | --- | --- | V | 仸2,弌椡抂巕OPEN |
| 儘乕儗儀儖弌椡揹埑 | VOL | --- | 0.45 | 0.6 | V | 仸2,踢俦邟飴R倠兌 |
| 僴僀儗儀儖僷儖僗暆 | T1 | 400 | --- | 800 | 兪S | 仸2 |
| 儘乕儗儀儖僷儖僗暆 | T2 | 400 | --- | 800 | 兪S | 仸2 |
| B.P.F.拞怱廃攇悢 | f0 | --- | 38 | --- | kHz |
僶乕僗僩攇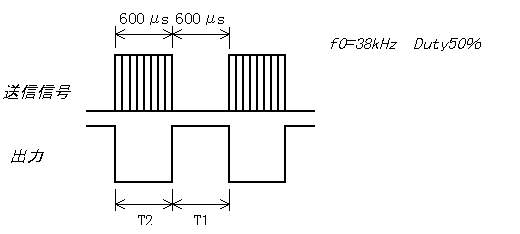 |
夞楬峔惉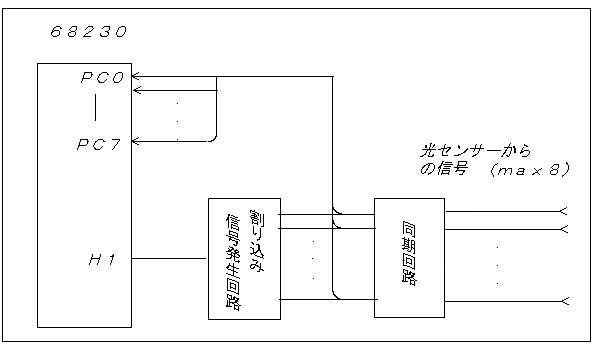 |
丒妱傝崬傒怣崋晹偼丄愒奜慄僙儞僒乕庴岝晹偐傜偺怣崋偵曄壔偑惗偠偨偲偒偵妱傝崬傒怣崋傪弌偡偲巚偆丅怣崋帺懱偼丄堦敪僷儖僗偱偼側偔懠偺攇宍偵側傞偲巚傢傟傞丅