
全体のモジュール構成図を以下に示す。
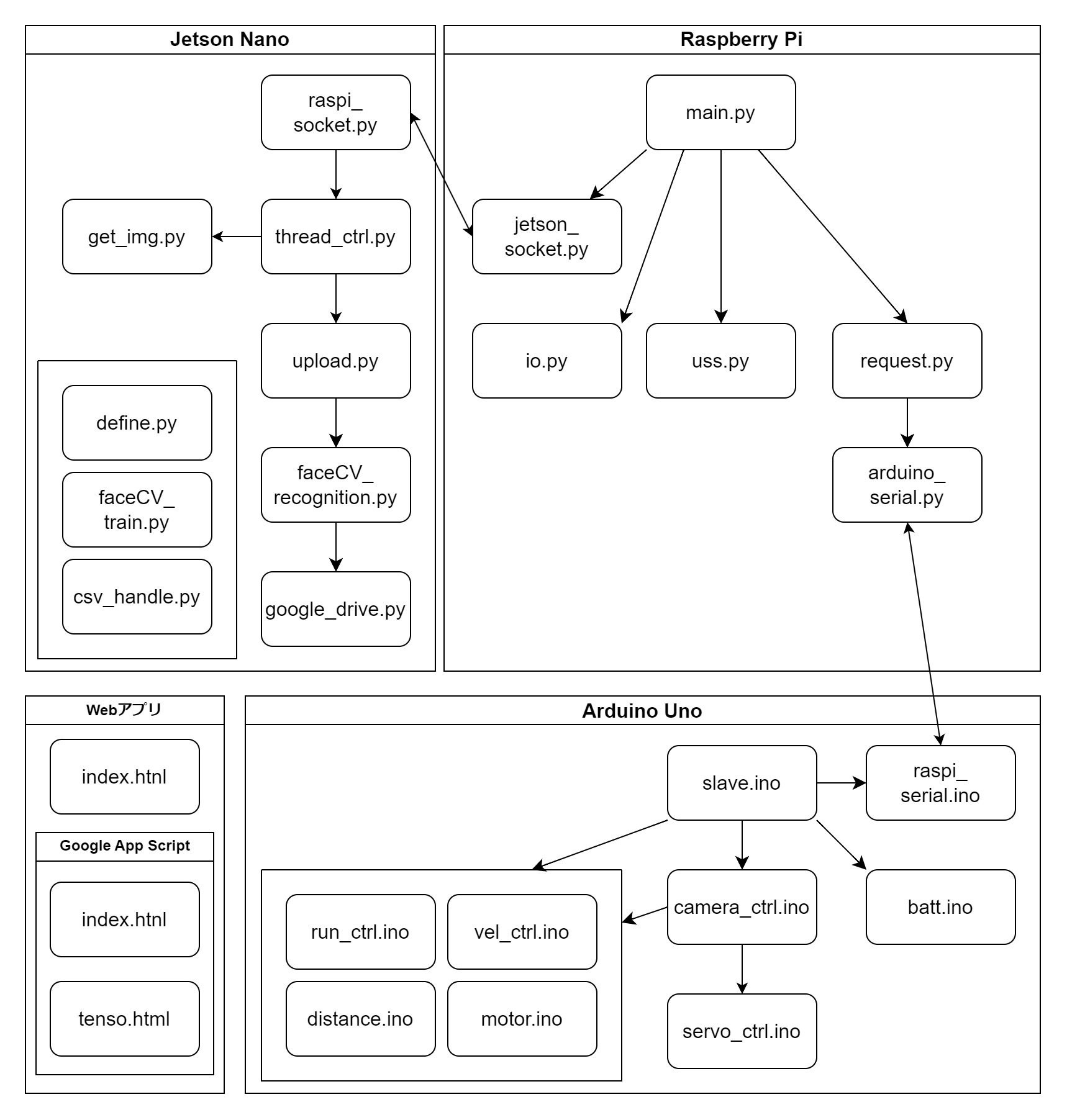
fig.1 モジュール構成図
各モジュール動作概要を以下に示す。
table.2 Jetson Nanoのモジュール概要
| モジュール名 | 動作概要 |
|---|---|
| raspi_socket.py | raspiとソケット通信を行い、jetsonの制御を行う。(クライアント) |
| thread_ctrl.py | Jetsonプログラムのスレッドをスレッドで実行し、管理する。 |
| get_img.py | webカメラから画像を取得する。 |
| faceCV_train.py | 顔写真から顔認証用データを学習する。 |
| faceCV_recognition.py | 撮影写真に写る人物の顔認証を行う。 |
| google_drive.py | Google Driveとデータの送受信を行う。 |
| upload.py | 顔認証(faceCV_recognition.py)からアップロード(google_drive.py)までを行う。 |
| schedule.py | 撮影スケジュールの管理を行う。 |
| csv_handle.py | データベースとしてcsvファイルの操作を行う。 |
table.3 Raspberry Piのモジュール概要
| モジュール名 | 動作概要 |
|---|---|
| main.py | raspi並びにロボット全体のメインプログラム |
| jetson_socket.py | jetsonとソケット通信を行う。(サーバー) |
| arduino_serial.py | arduinoとのシリアル通信を行う。 |
| request.py | arduinoとの通信用関数 |
| io.py | raspiの衝突検知用タッチセンサ関数 |
| uss.py | raspiの衝突防止用超音波センサ関数 |
table.4 Arduinoのモジュール概要
| モジュール名 | 動作概要 |
|---|---|
| slave.ino | raspiからの指示に基づきarduinoを制御する。 |
| raspi_serial.ino | raspiとのシリアル通信を行う。 |
| run_ctrl.ino | 走行モードの制御を行う。 |
| vel_ctrl.ino | 速度制御を行う。 |
| camera_ctrl.ino | 昇降用モータの制御を行う。 |
| servo_ctrl.ino | サーボモーターの制御を行う。 |
| distance.ino | ロボットの左右タイヤの移動量を計算する。 |
| encoder.ino | モーターのエンコーダの値を取得する。 |
| motor.ino | モーター制御を行う。 |
| io.ino | 昇降用タッチセンサやフォトリフレクタなどセンサ類のデータ取得を行う。 |
| batt.ino | バッテリー管理を行い、電圧が低い場合動作を停止させる。 |
table.5 Webアプリケーションのモジュール概要
| モジュール名 | 動作概要 |
|---|---|
| (GAS) tenso.gs | スプレッドシート上に入力された情報を取得、またその情報をhtmlに転送 |
| (GAS) index.html | ユーザーに対して表示するwebページ。CSSによる装飾、javascriptによる写真取得、取得した写真の自動表示等も同時に行う。 |
| (管理台帳/) index.html | MIRS2303のドキュメント内のURLに設定し、GASのhtmlを表示する。またBasic認証でログイン機能を実装する。 |



