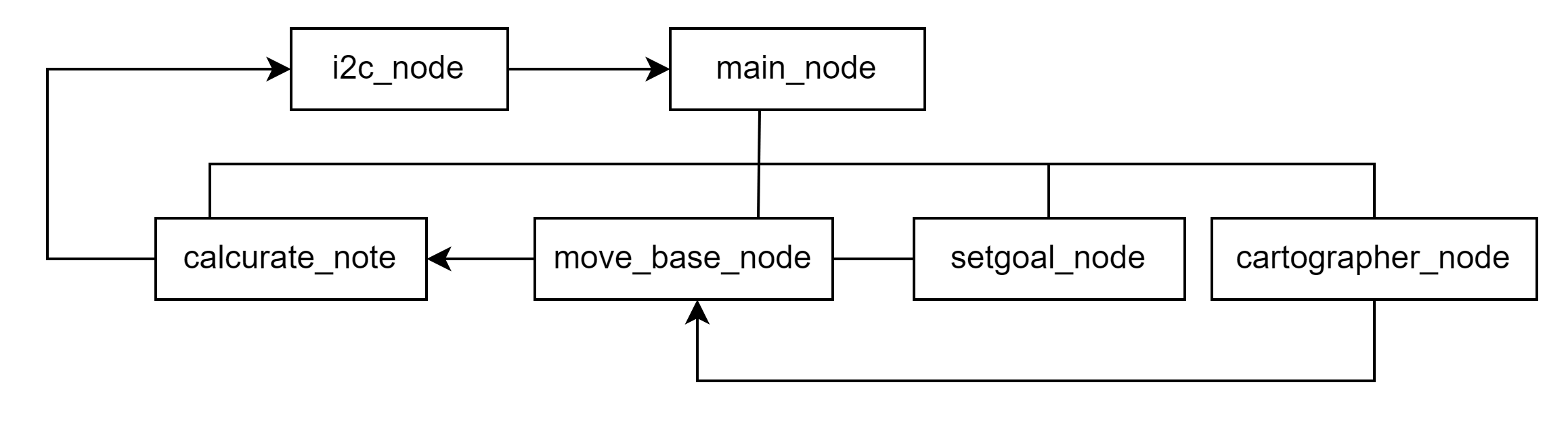
figure1. :子機・JETSONのモジュール構成
| 名称 | MIRS2301 子機ソフト詳細設計 |
|---|---|
| 番号 | MIRS2301-SOFT-0002 |
| 版数 | 最終更新日 | 作成 | 承認 | 改訂記事 |
|---|---|---|---|---|
| A01 | 2023.11.21 | 小野颯斗 | 香川真人 | 初版 |
本ドキュメントはROCASLの子機のソフトウェア詳細設計書である。
機能概要をTable1に示す。
| 機能 | 概要 | 記述言語 |
|---|---|---|
| マッピング | ライダーを使い周辺情報を取得 | ros,python, JETSON |
| 床掃除 | マッピング情報をもとに床を走行 | C言語,ESP32 |
| 親機と通信 | 親機のESP32と通信する | C言語,ESP32 |
| i2c通信 | JETSONとESP32で通信する | python,JETSON ,C言語,ESP32 |
子機のJETSONのモジュール構成をfigure1, Table2に示す。
| モジュール名 | 概要 |
|---|---|
| main_node | JETSONの動作の制御をする |
| cartographer_node | マッピングと自己位置推定 |
| setgoal_node | ゴールの設定 |
| move_base_node | ルート作成 |
| calculate_node | ゴールへのモータ出力を計算する |
| i2c_node | i2cで通信する |
子機のESP32のモジュール構成をfigure2, Table3に示す。

| モジュール名 | 概要 |
|---|---|
| main.ino | 全体の状態遷移をする |
| i2c.ino | i2c通信をする |
| motor.ino | モータの制御をする |
| bt.ino | bluetoothで通信をする |
| io.ino | タッチセンサの監視をする |
子機のフローチャートをfigure3に示す。また、それぞれの状態についてTable4に示す。
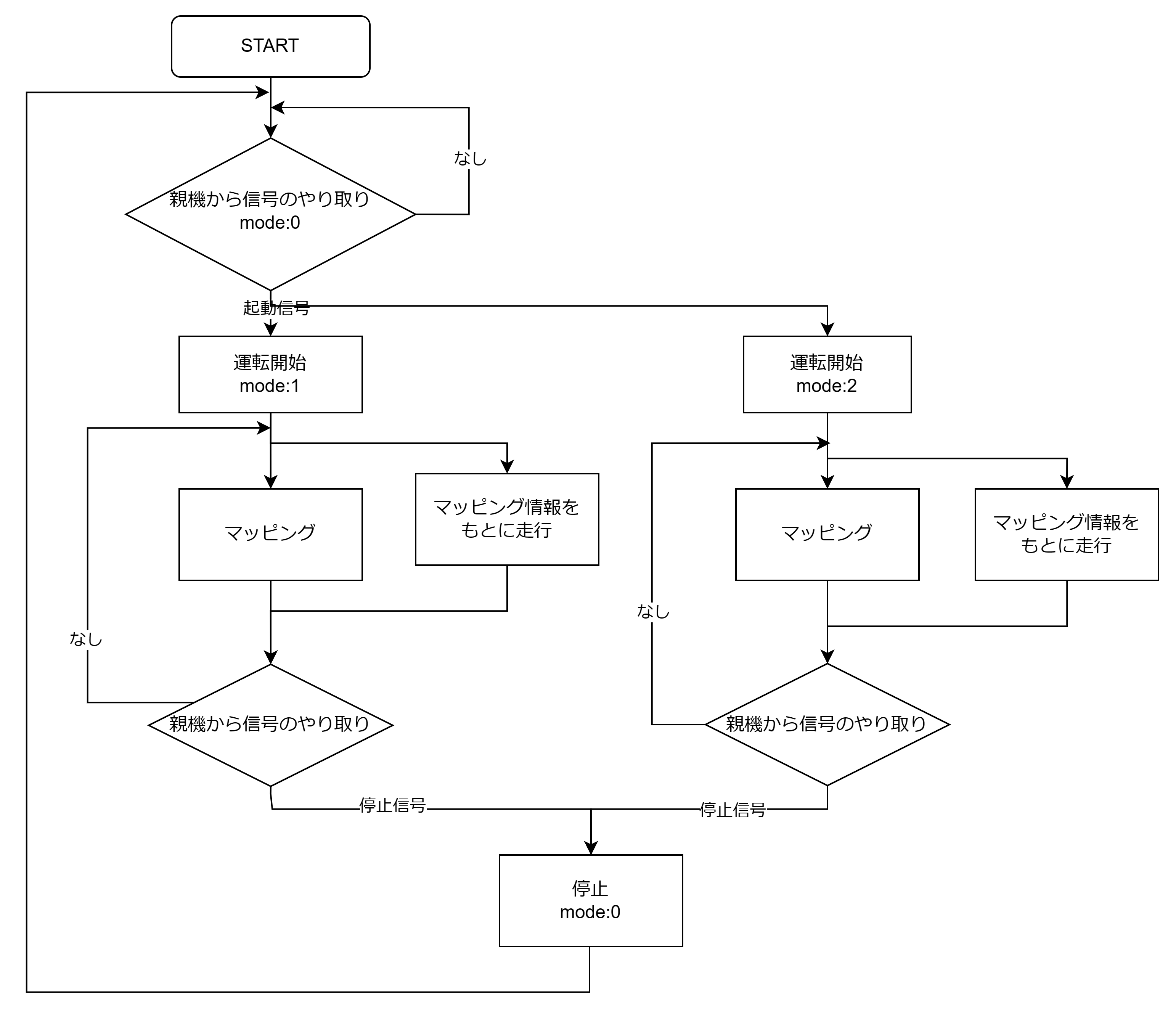
| 状態名 | 概要 |
|---|---|
| 0: 停止中 | 完全に停止している状態 |
| 1: 掃除中 | 移動しながら掃除をしている状態 |
| 2: 黒板付近の掃除中 | 黒板付近の掃除をしている状態 |